收稿日期:2020-05-21 录用日期:2020-06-28
基金项目:国家重点研发计划(2016YFC0701106); 国家自然科学基金(51978591)
通信作者:guowei@csu.edu.cn
基金项目:国家重点研发计划(2016YFC0701106); 国家自然科学基金(51978591)
通信作者:guowei@csu.edu.cn
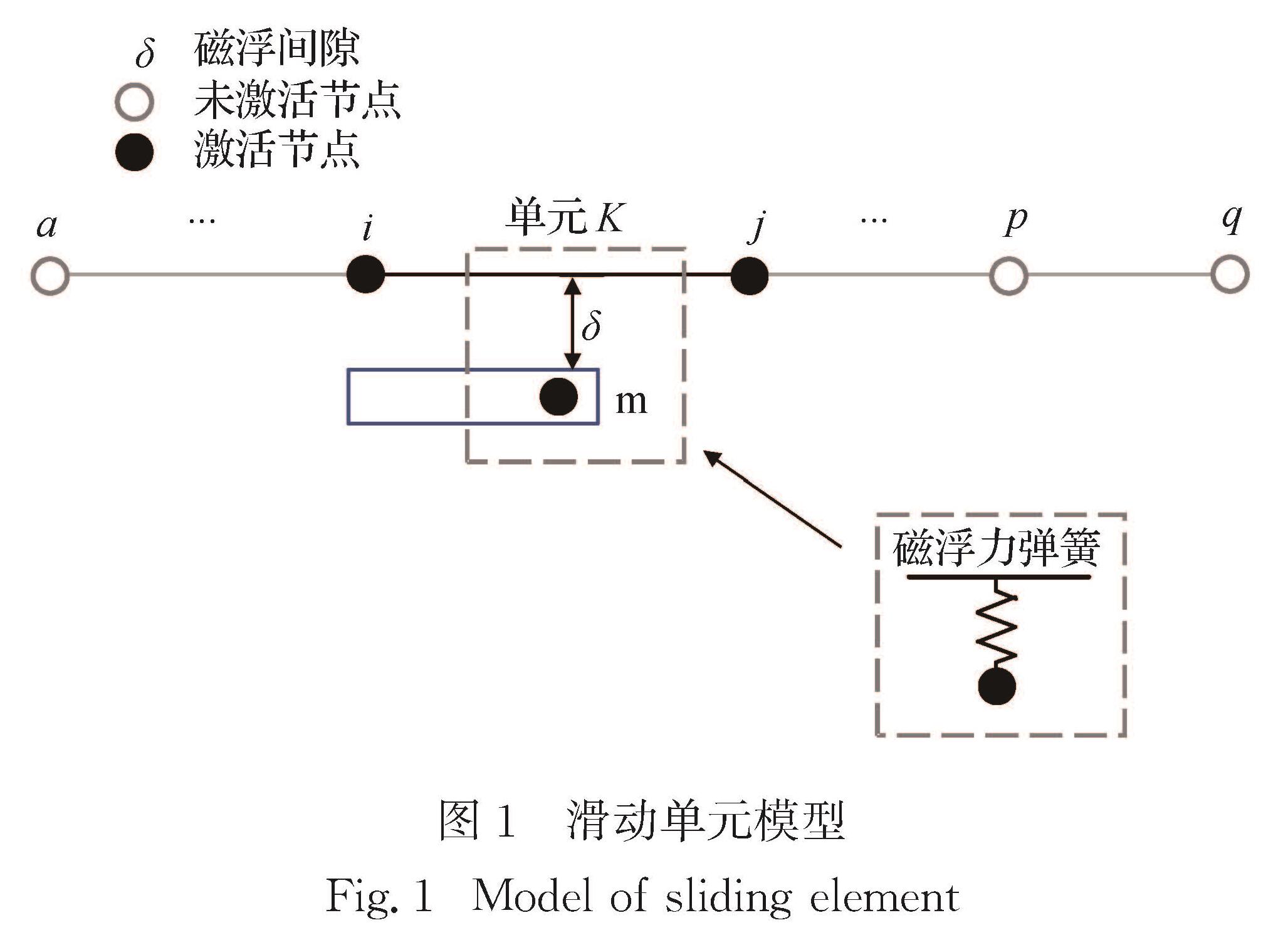
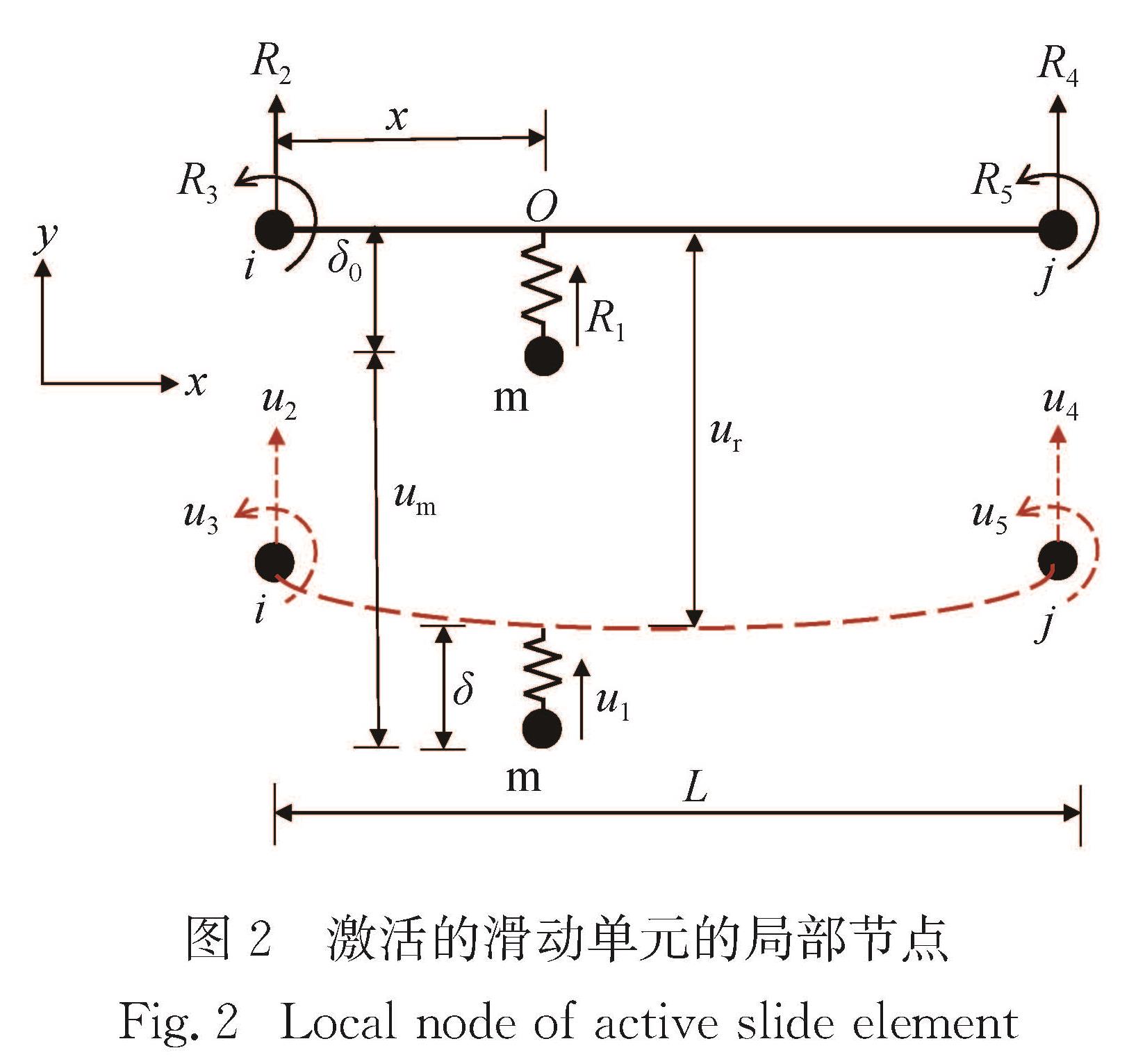
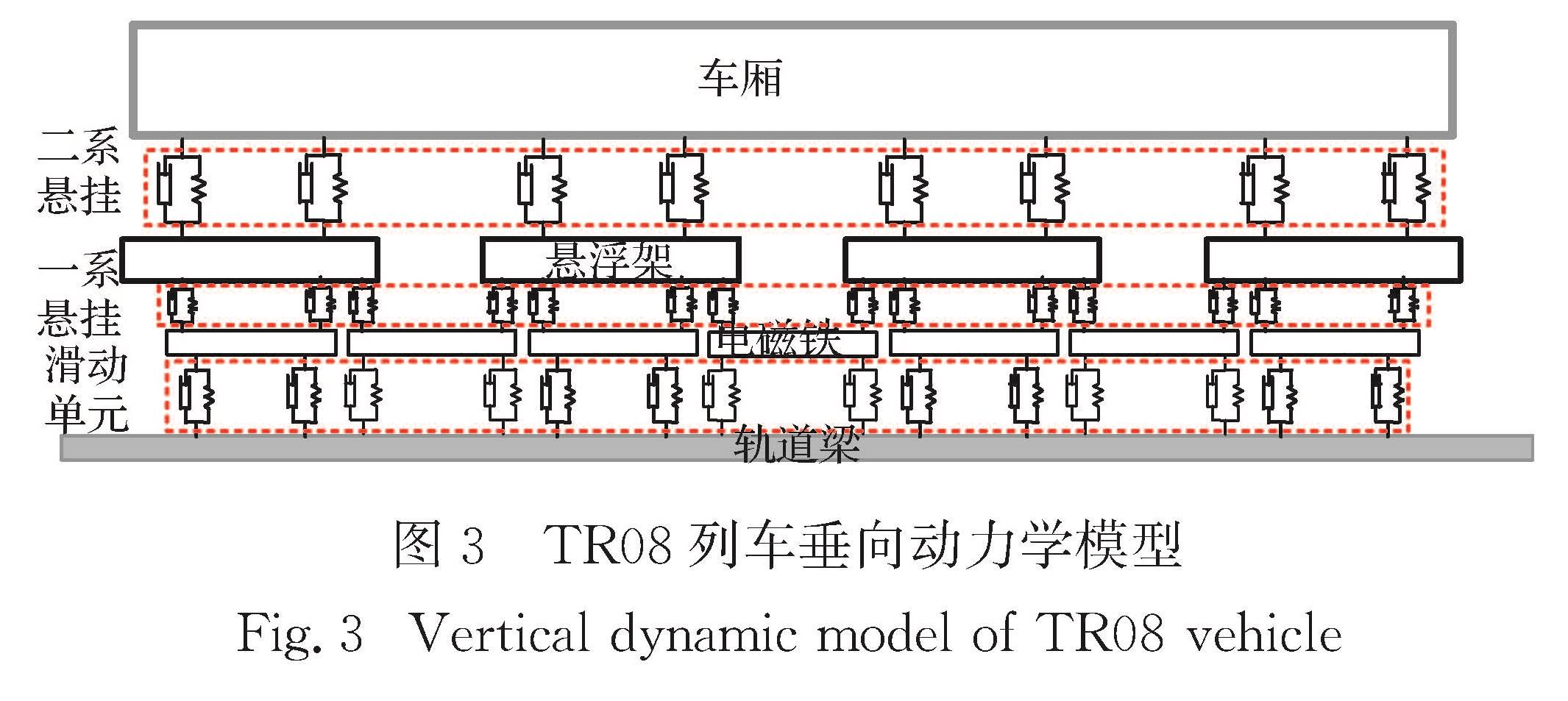
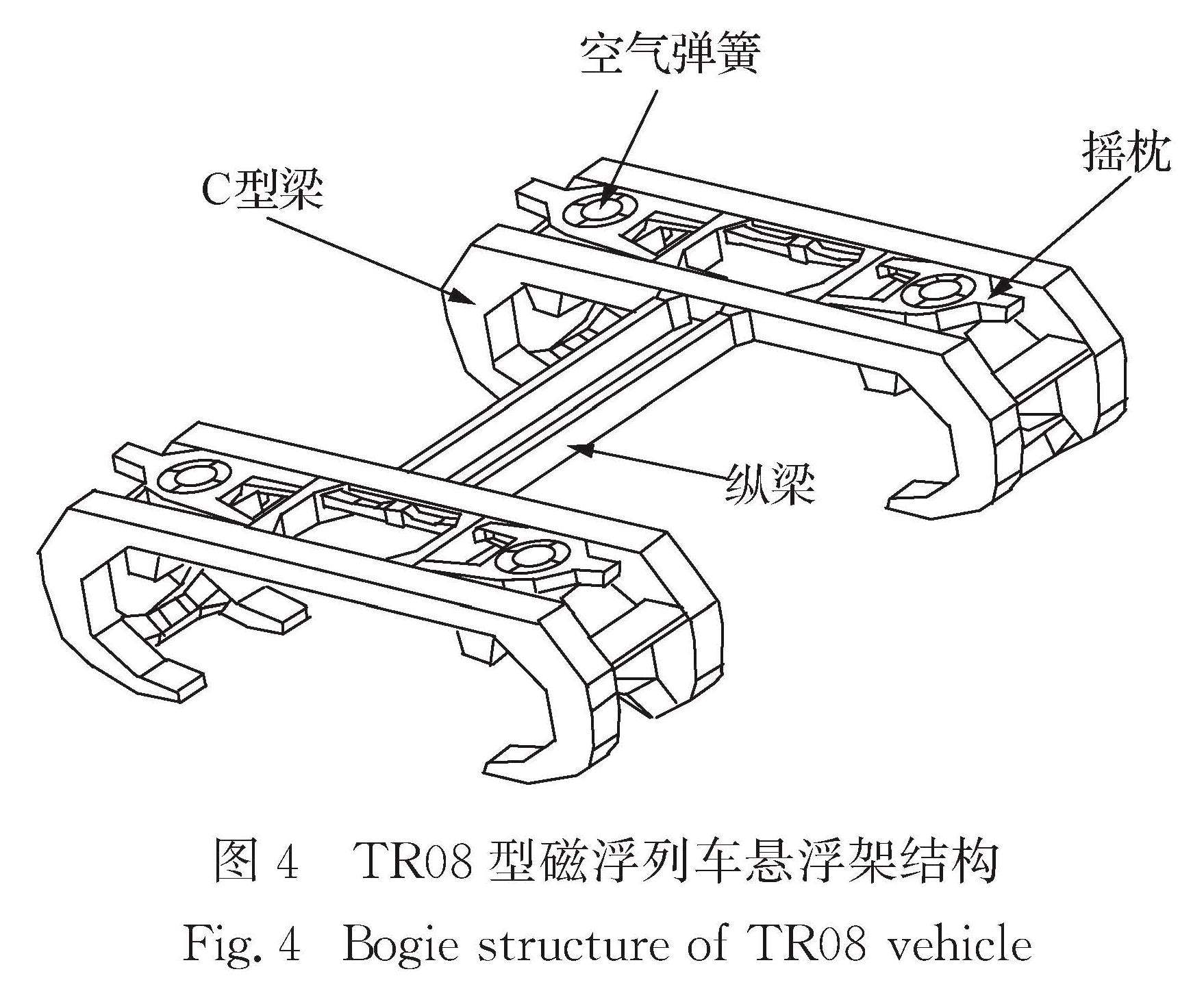
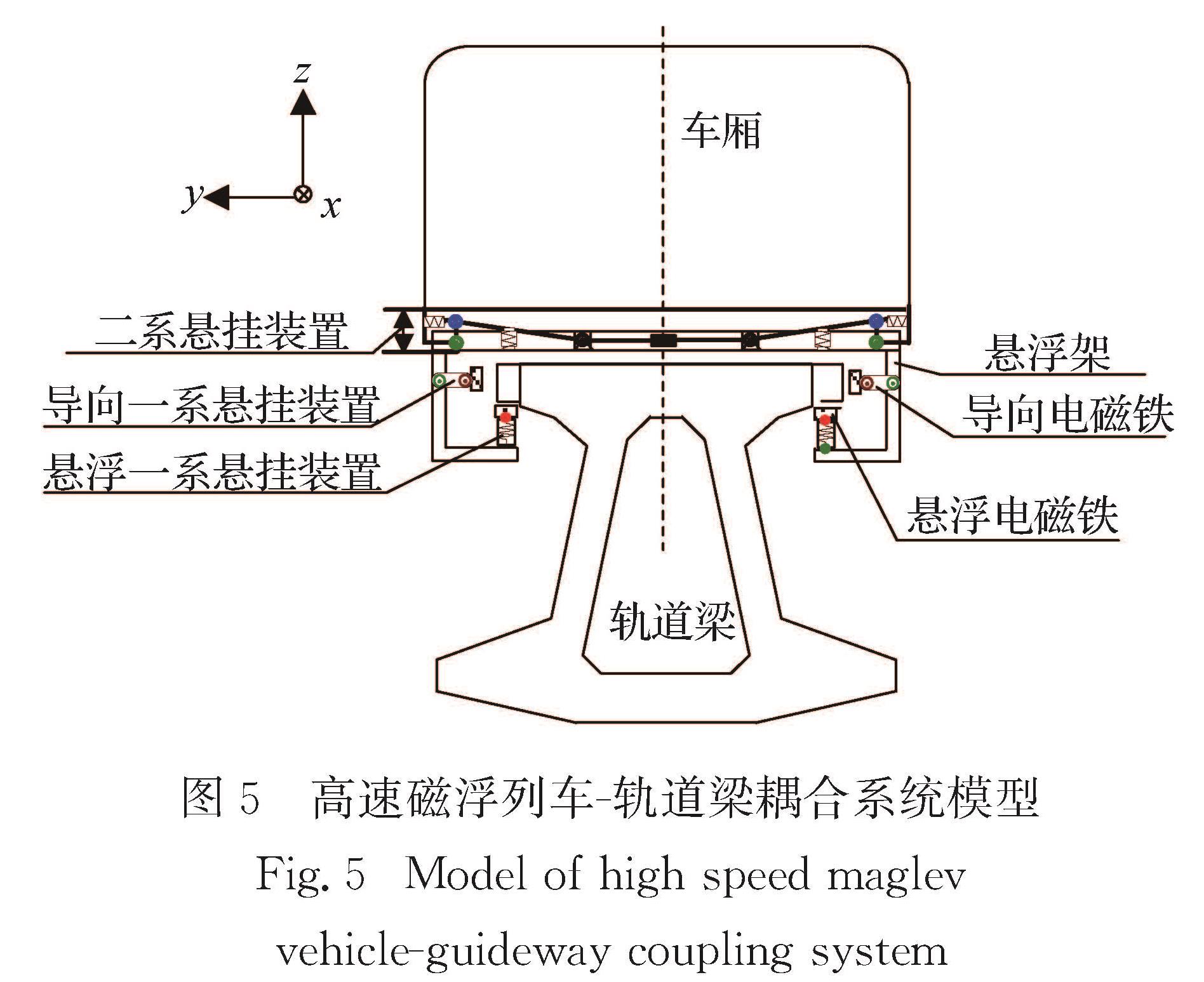
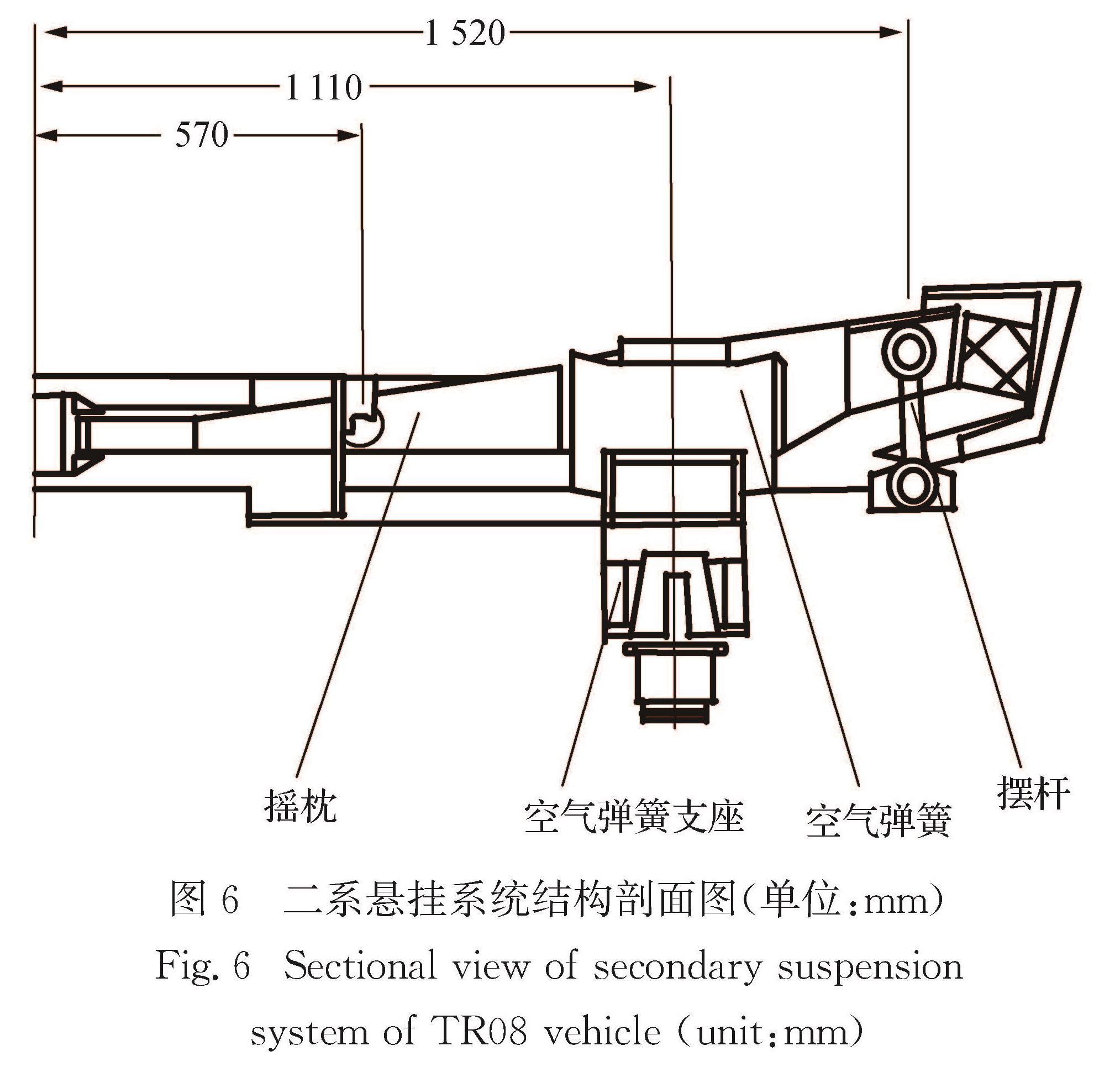
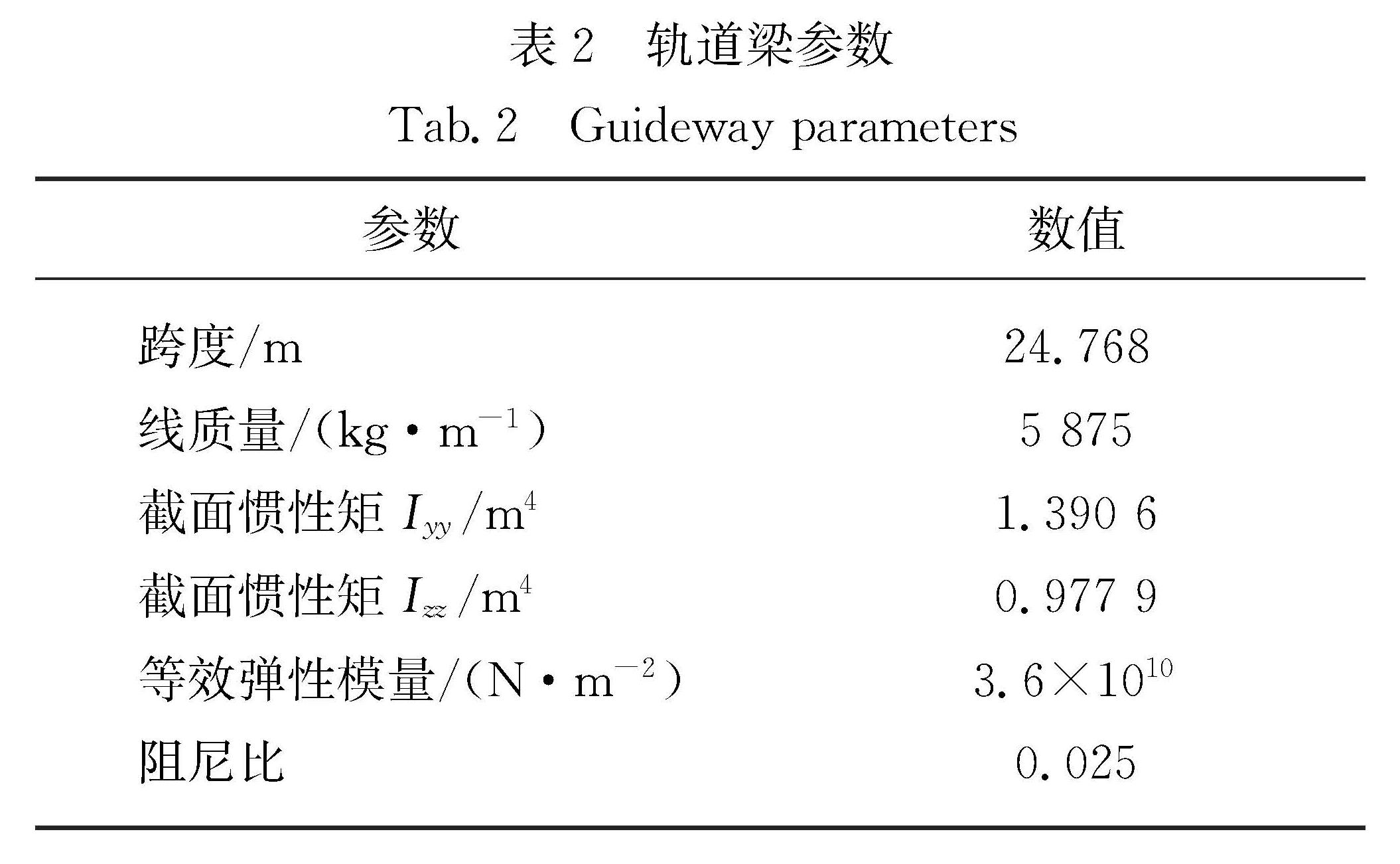
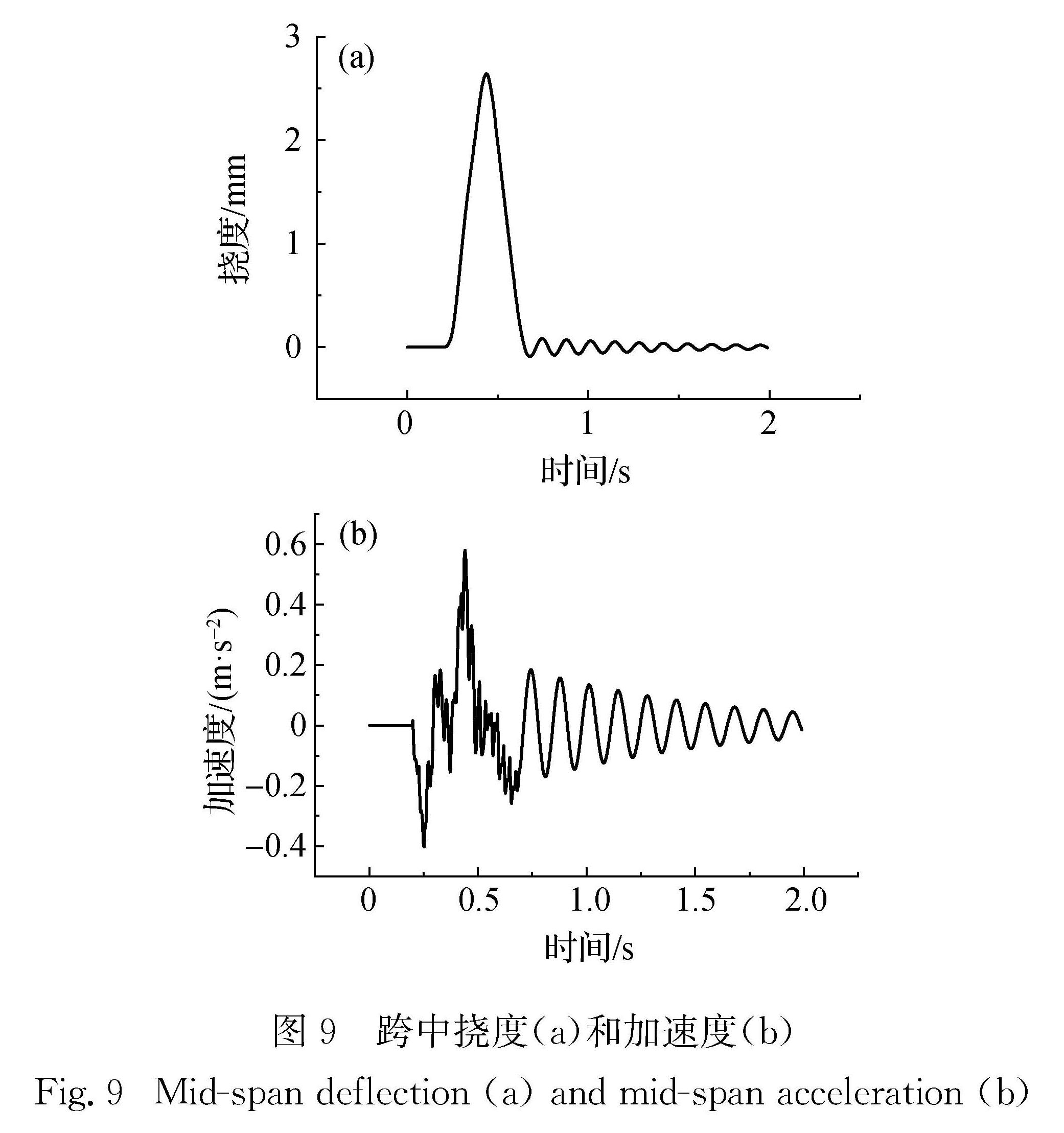
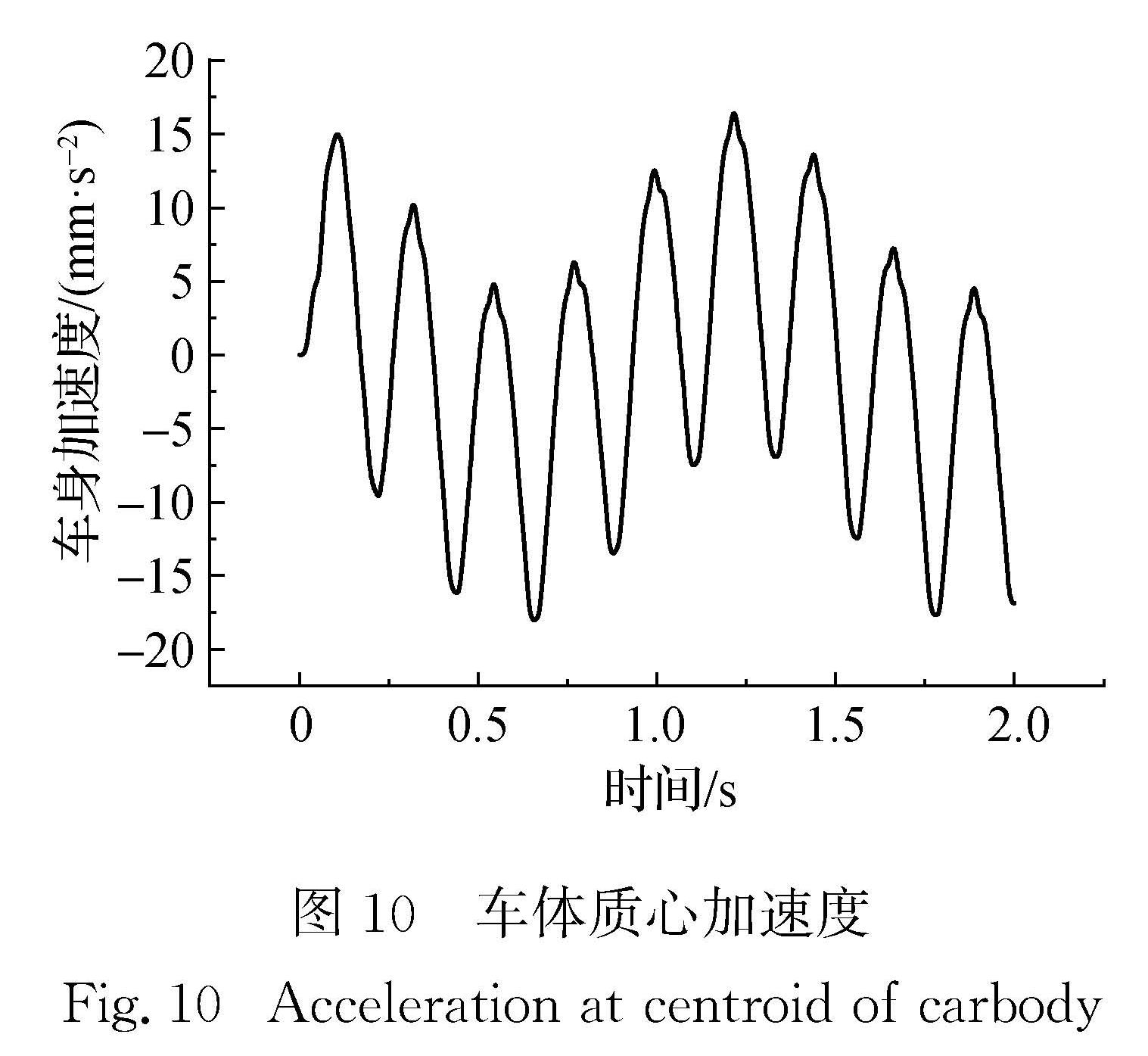
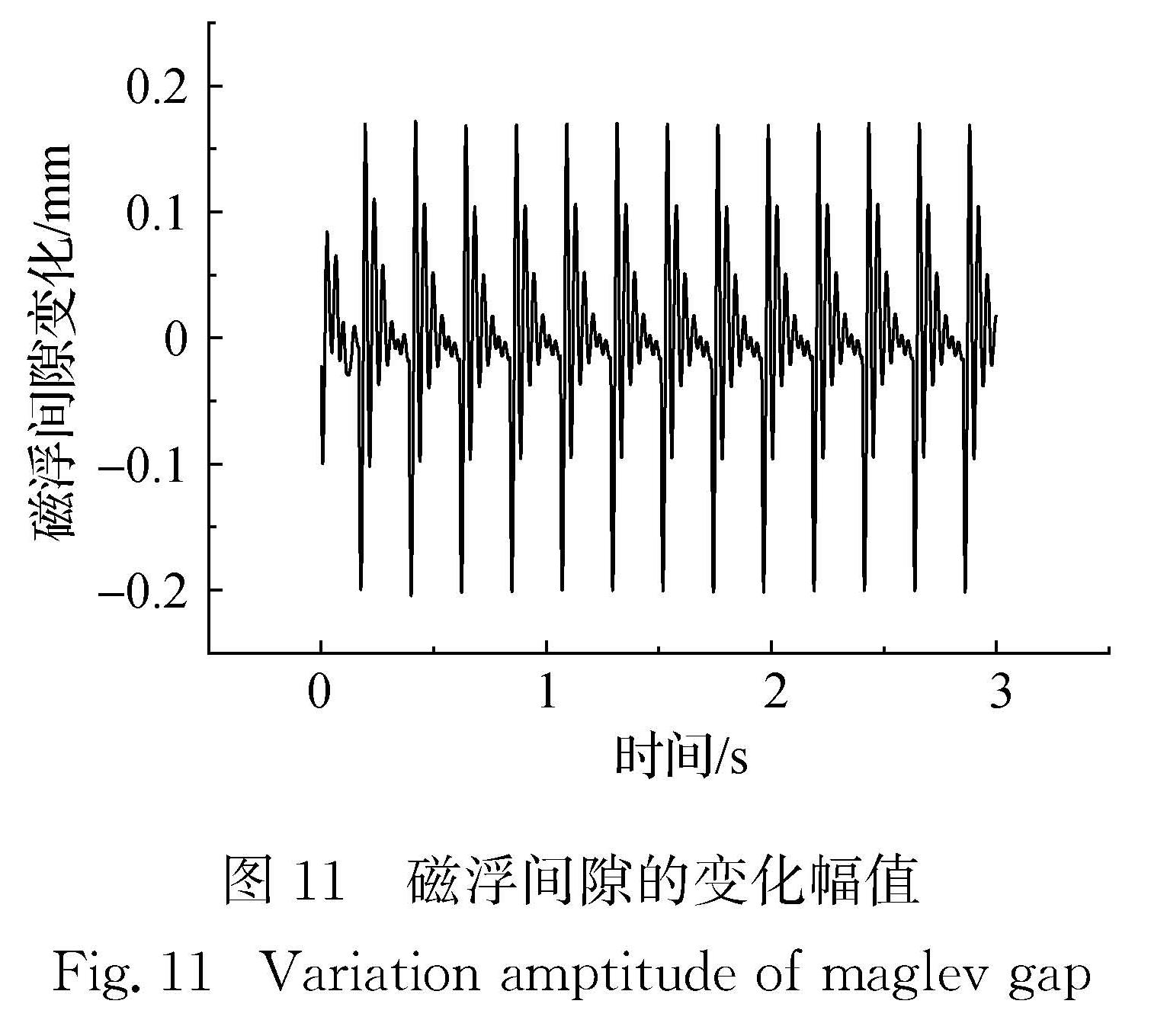
基于一种滑动单元,使用弹簧阻尼磁浮力模型,推导了适用于高速磁浮列车-轨道梁系统的滑动单元的刚度矩阵.在有限元OpenSees软件平台上建立了二维平面内高速磁浮列车-轨道梁耦合系统的有限元模型.以TR08磁浮列车和上海Emsland磁浮轨道梁为例,进行建模计算,得到了磁浮列车与桥梁的动力响应及其振动规律.通过与文献中的结果进行对比,验证了模型结果的可靠性,改进后的滑动单元可用来研究高速磁浮列车-轨道梁耦合系统的车桥耦合动力问题.
The stiffness matrix of a sliding element suitable for the high-speed maglev vehicle-guideway coupling system is derived by using the linear spring damping maglev force model.The finite element model of two-dimensional in-plane high-speed maglev vehicle-guideway coupling system is established in software framework OpenSees.Taking TR08 Maglev vehicle and Shanghai Emsland guideway as examples,we obtain the dynamic response and vibration law of maglev trains and bridges.Compared with results in the literature,the reliability of the model results is demonstrated.The improved sliding element can be used to study the dynamic interaction of the high-speed maglev vehicle-guideway coupling system.