由于RV减速器结构复杂,影响传动误差的因素很多,通过实验手段分析误差因素是很困难的.因此,本文采用等效误差模型法求解传动误差,将多种误差以等效误差的形式进行替代,简化了误差表达形式的同时也有利于分析单个误差对传动精度的影响.
1.1 等效模型建立
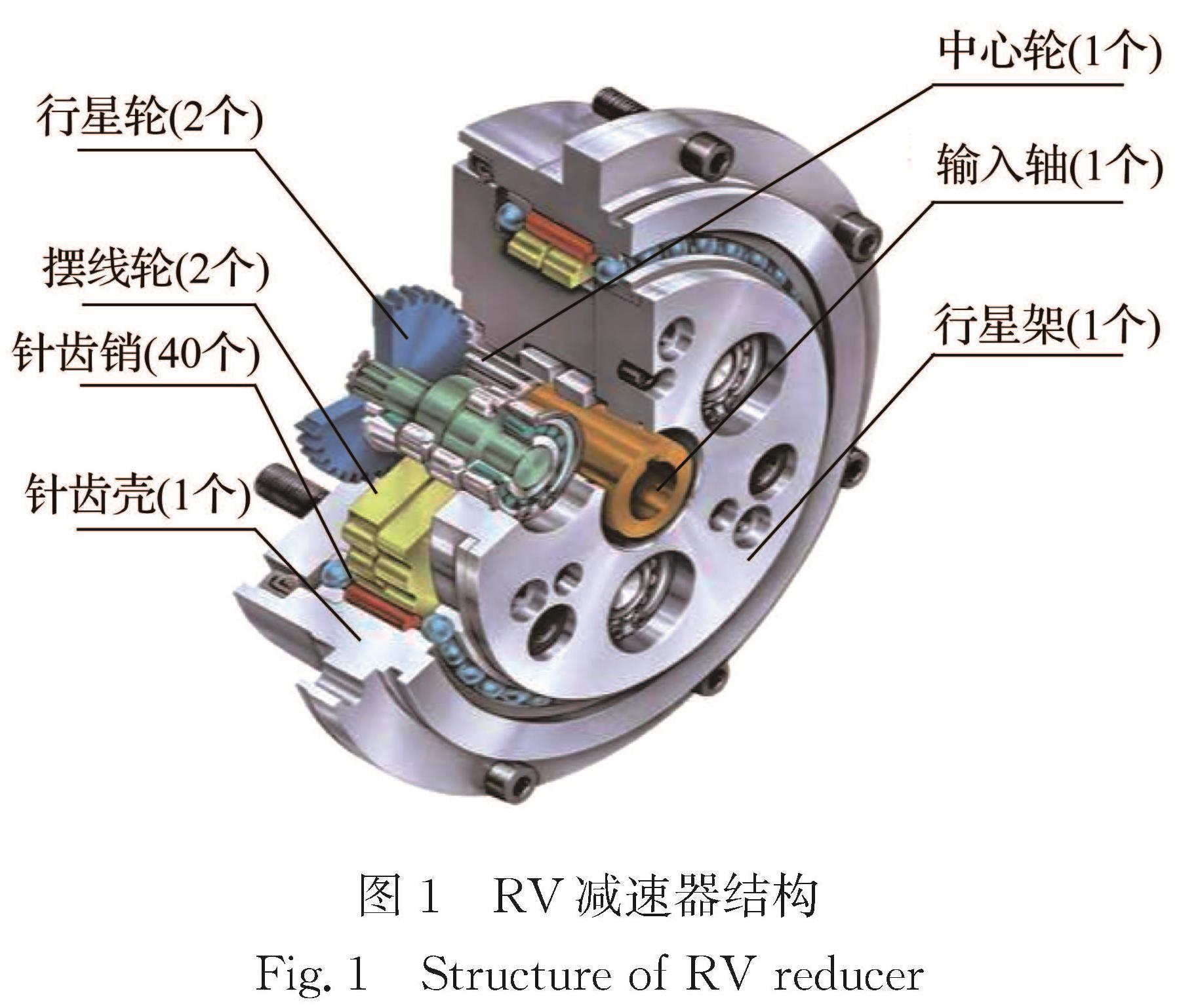
由Teruaki等[6]提出的等效误差模型核心思想是将减速器各传动部件间的位移变量转化为对应的弹簧变化量,将机构中的每个零件等效为一个刚体,各个零件间存在着误差、啮合间隙和理论位置与实际位置的偏差等多种因素,将这些因素用弹簧变量来表示,这种简化的误差替代模型可以称作等效误差模型.在等效误差模型的基础上可以推导出各个部件所受力的大小,从而建立该部件的动力学方程组.通过计算动力学方程组,可以得出各个部件间的距离大小,进而计算出传动误差.本文使用的RV减速器的结构如图1所示.
图1 RV减速器结构
Fig.1 Structure of RV reducer
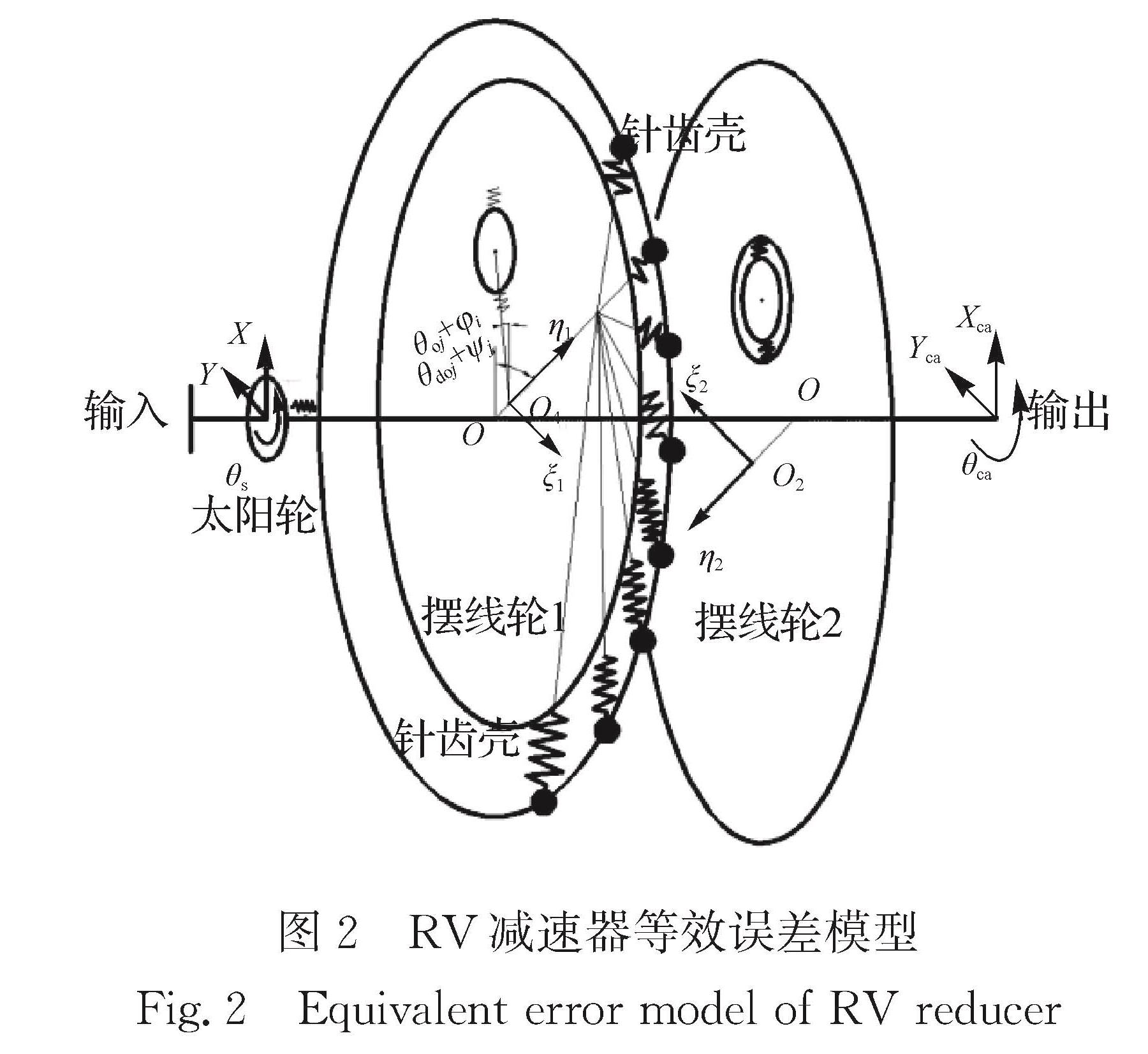
图2展示了使用等效误差模型对RV减速器进行建模后的简化模型.
图2 RV减速器等效误差模型
Fig.2 Equivalent error model of RV reducer
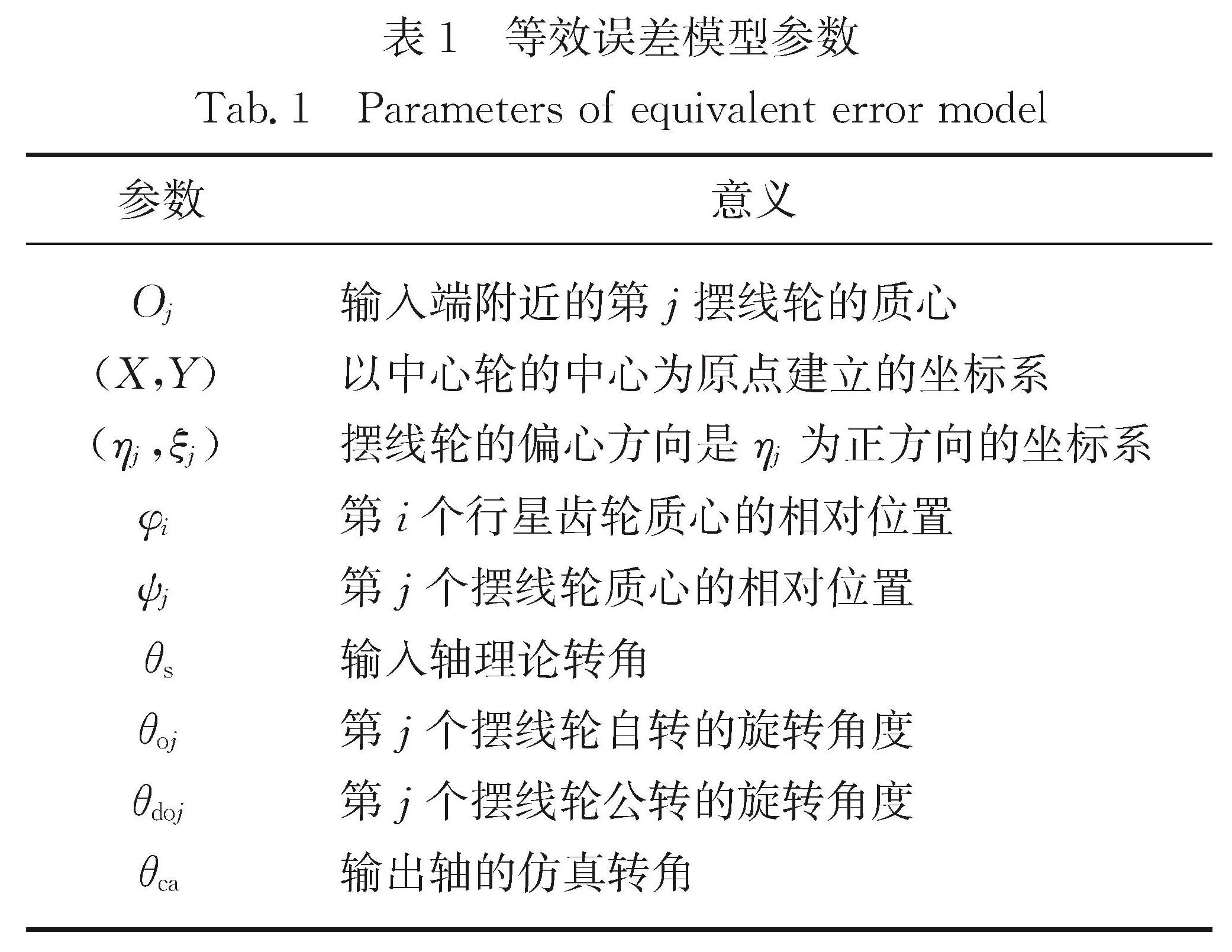
等效误差模型的各参数及其意义见表1.
在图2所示的模型中,零件之间的支承刚度和齿轮啮合刚度被弹簧代替.通过对各零件间的误差分析,可以得到各角的等效误差量.根据文献[6],针对RV减速器的不同机构分别建立了动力学方程.
表1 等效误差模型参数
Tab.1 Parameters of equivalent error model
(i)中心轮动力学方程如式(1)和(2),Rspi代表第i个行星轮与中心轮啮合刚度,Sspi代表第i个行星轮与中心轮在啮合线上的等价位移,γi代表第i个行星轮啮合线与X轴的夹角,Rs代表齿轮轴支撑刚度,Xs代表中心轮X方向位移,aSX代表中心轮X方向的装配误差,Ys代表中心轮Y方向位移,aSY代表中心轮Y方向的装配误差.
∑2i=1(RspiSspicosγi)+Rs(Xs-aSX)=0,(1)
∑2i=1(RspiSspisinγi)+Rs(Ys-aSY)=0.(2)
(ii)行星轮动力学方程如式(3)~(5),Rpd代表圆柱滚子轴承刚度,Sdjix代表第i个曲轴与第j个摆线轮接触处的X方向等价位移,Rb代表圆锥滚子轴承刚度,Scix代表第i个曲轴与行星架接触处的X方向等价位移,Sdjiy代表第i个曲轴与第j个摆线轮接触处的Y方向等价位移,Sciy代表第i个曲轴与行星架接触处的Y方向等价位移,asp代表曲轴中心距,e代表曲轴偏心距,Bj代表第j个摆线轮的理论自转角.
SspiRspicosγi-∑2j=1(RpdSdjix)-RbScix=0,(3)
SspiRspisinγi-∑2j=1(RpdSdjiy)-RbSciy=0,(4)
SspiRspiasp+e∑2j=1(RpdSdjixsin Bj+
RpdSdjiycos Bj)=0.(5)
(iii)摆线轮动力学方程如式(6)~(8),αjk代表第k个针齿的啮合线与第j个摆线轮的ηj轴夹角,Sdjk代表第j个摆线轮与第k个针齿法向接触方向的等价位移,Rdjk代表第j个摆线轮与第k个针齿间的啮合刚度,Pi代表第i个曲轴的理论自转角,rd代表摆线轮节圆半径.
∑2i=1(RpdSdjixsin Bj+RpdSdjiycos Bj)+
∑mk=1RdjkSdjksin αjk=0,(6)
∑2i=1(RpdSdjiysin Bj-RpdSdjixcos Bj)+
∑mk=1RdjkSdjkcos αjk=0,(7)
∑2i=1asp(RpdSdjiycos Pi-RpdSdjixsin Pi)+
rd∑mk=1RdjkSdjksin αjk=0.(8)
(iv)行星架动力学方程如式(9)~(11),Rb代表圆锥滚子轴承刚度,Rca代表角接触轴承刚度,Xca代表行星架X方向位移,acx代表行星架X方向的装配误差,Yca代表行星架Y方向位移,acy代表行星架Y方向的装配误差,Tout代表输出小转矩.
∑2i=1RbScix-Rca(Xca-acx)=0,(9)
∑2i=1RbSciy-Rca(Yca-acy)=0,(10)
asp∑2i=1(RbScixsin Pi-RbSciycos Pi)=Tout.(11)
将各部件的动力学方程转化为矩阵的形式如式(12),其中R是一个17×17的刚度矩阵,P为17×1的力矢量,Y是等价误差模型位移量的矩阵形式.
RY=P.(12)
YT=[Xs,Ys,XP1,YP1,θP1,XP2,YP2,θP2,ηd1,
θd1,θd01,ηd2,θd2,θd02,Xca,Yca,θ ^ca],
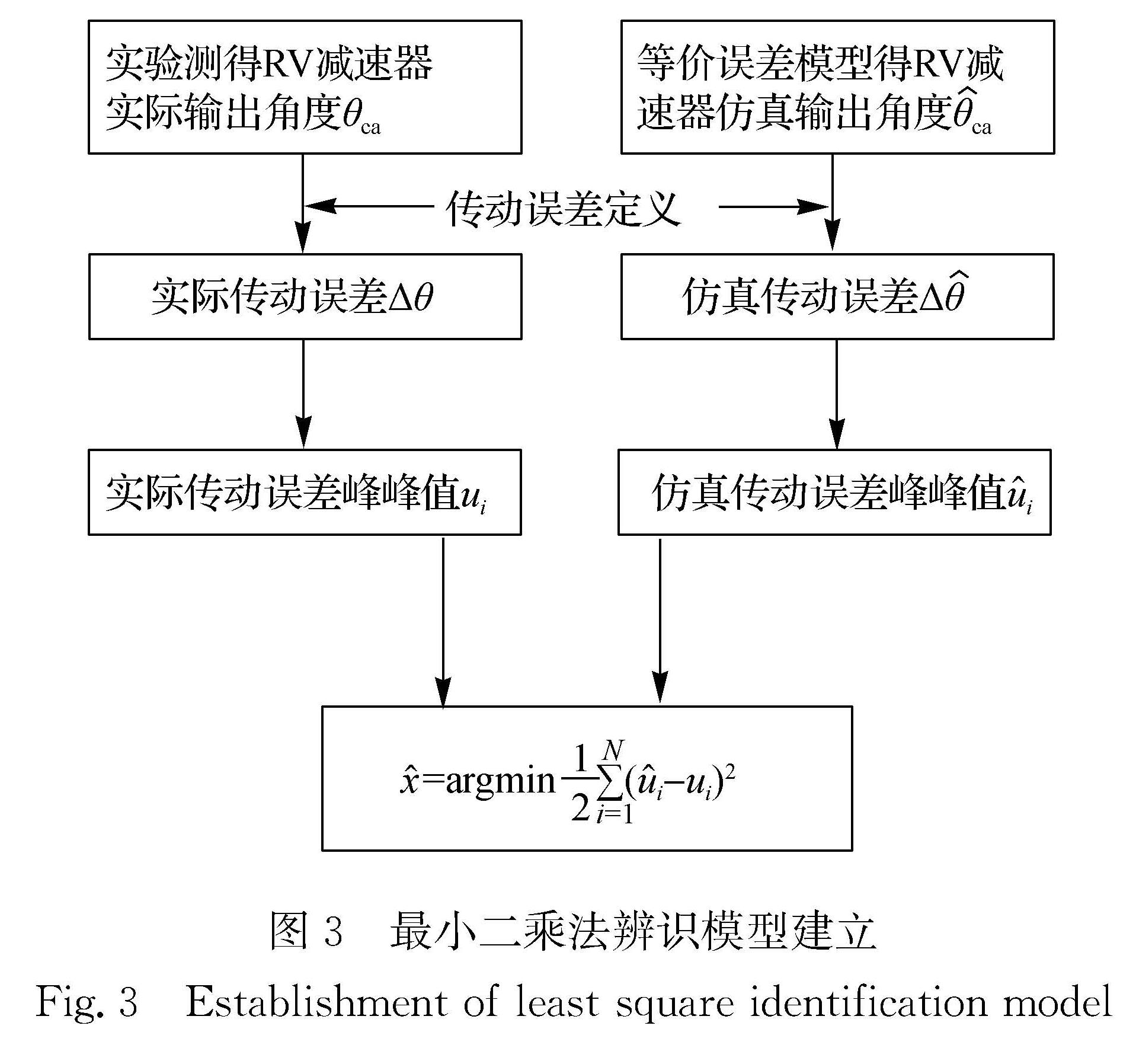
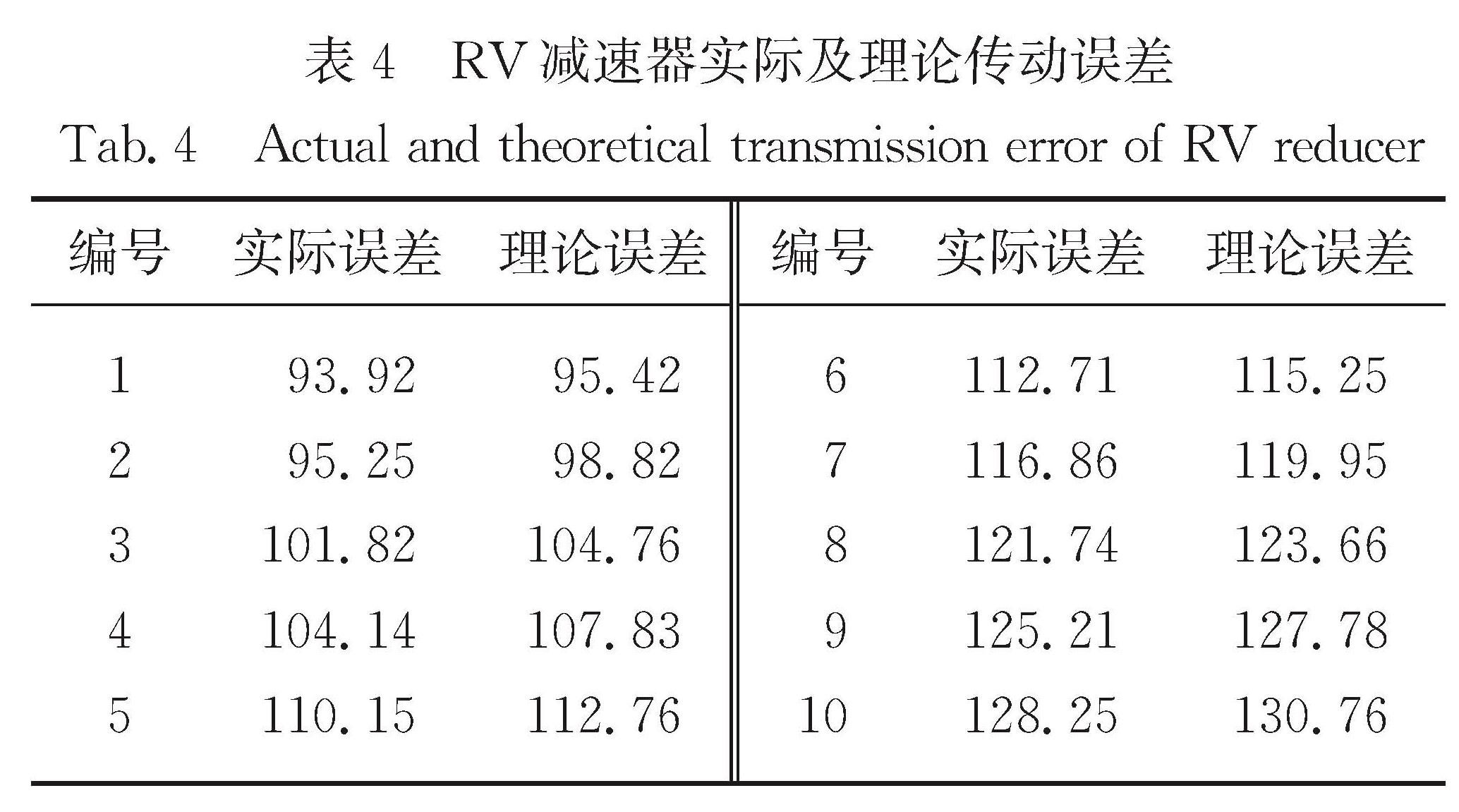
其中RV减速器基于等价误差模型的输出角度值为θ ^ca.RV减速器的输出角度实际值为θca.RV减速器输出角度的理论值可经计算设为θc,则实际的传动误差Δθ=θca-θc,基于等价误差模型的传动误差Δθ ^=θ ^ca-θc.
1.2 辨识参数分析
上文建立了RV减速器的等效误差模型,R是刚度矩阵,包括了Rspi、Rs、Rdjk、Rca、Rb和Rpd6种刚度,分别代表第i个行星齿轮和中心轮啮合刚度、齿轮轴支撑刚度、第j个摆线轮与第k个针齿之间的啮合刚度、角接触轴承刚度、圆锥滚子轴承刚度和圆柱滚子轴承刚度.
由于Rspi和Rs都在RV减速器的第一级减速部分,所以误差被转换到输出轴上时减小了减速比的倍数,而RV减速器的减速比很大,Rspi和Rs经过减速比缩小后,对传动误差几乎没有影响,所以无需考虑.在二级减速过程中,由于摆线齿轮对称放置在减速器的两边,所以啮合刚度Rdjk会被抵消,也无需纳入考虑,只需要对Rca、Rb、Rpd3个参数进行优化.根据文献[14-15],可以得到这3种轴承接触刚度的经验公式.
Rca=(Egn3rg0.5)/(3(1-μ2)),(13)
Rb=(πl2En2)/(8(1-μ2)sin(80π/180)),(14)
Rpd=(πl1En1)/(8(1-μ2)).(15)
其中,μ代表轴承接触面材料的泊松比,E代表轴承滚子的弹性模量,l1代表圆柱滚子轴承滚针的接触长度,n1代表单个圆柱滚子轴承中滚针的数量,l2代表圆锥滚子轴承滚针的接触长度,n2代表单个圆锥滚子轴承中滚子的数量,Eg代表轴承内滚道材料的弹性模量,n3代表单个角接触轴承滚珠数量,rg代表啮合针齿的直径.
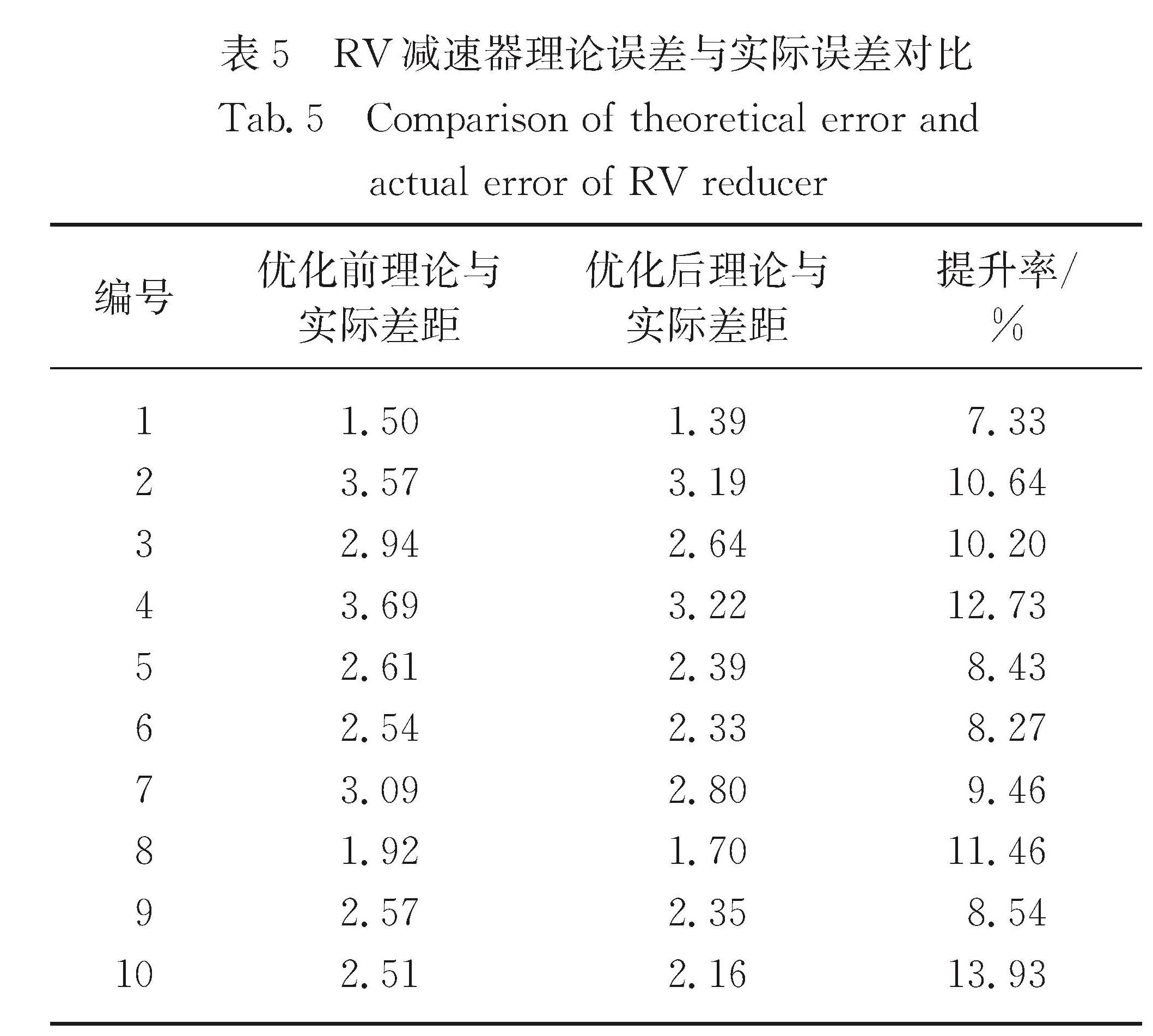
由于等效误差模型已经将RV减速器各部件间的误差通过弹簧变量进行了等效,所以可以使用经典的齿轮经验公式对接触刚度进行计算; 但是受到齿轮制造误差、加工误差以及制造材料的影响,因此还需要对接触刚度的参数进行优化,以提高RV减速器经等效误差模型建模后的传动精度.