如图3所示,相机安装在机器人末端,组成手眼标定视觉反馈实验平台.其中机器人选用UR5六自由度工业机械臂,机器人控制器作为下位机完成机器人运动学运算,同时驱动机器人各个关节.上位机选用Intel Corei5 2.67 GHz CPU, 4 GB RAM计算机,用于图像处理和运算视觉伺服控制算法.计算机与机器人控制器通过TCP/IP连接,构成视觉伺服闭环系统.
图3 眼在手视觉伺服实验平台
Fig.3 The eye-in-hand visual servoing platform
以机器人抓取定位为测试实验,图3(a)为机器人初始姿态及观测图像特征,图3(b)为机器人抓取姿态及期望图像特征,实验设定控制率λ=0.25,系统采样间隔为0.1 s,机器人控制量U(k)∈R6×1为末端线速度和角速度,为简化特征提取过程,以4个圆点作为抓取定位特征,因此特征向量f(k)=[f1(k),f2(k),f3(k),f(k)4]T∈R8×1,式中fi=(uivi)为第i个特征点图像坐标,在机器人初始姿态采用试探运动方法确定粗略雅可比为:
Jκ(0)=
[-0.81 0 0.23 -0.06 -2.03 -0.32
0 -0.81 -0.23 2.14 0.03 -0.32
-0.81 0 0.23 0.06 -2.03 0.32
0 -0.81 0.23 2.14 -0.03 -0.32
-0.81 0 -0.23 -0.06 -2.03 0.32
0 -0.81 0.23 2.14 0.03 0.32
-0.81 0 -0.23 0.06 -2.03 -0.32
0 -0.81 -0.23 2.14 -0.03 0.32]8×6.
实验分别采用文献[20]中基于卡尔曼滤波(Kalman filtering,KF)的雅可比估计IBVS控制策略、经典PBVS控制策略[3],以及本文研究的ADRC雅可比未建模视觉伺服控制策略进行对比,伺服任务为控制机器人末端从任意初始姿态定位到期望抓取姿态,并且抓取过程要求机器人大范围运动.为了验证各方法的鲁棒性能,实验设定特征点靠近图像边缘区域,因此初始特征为f(0)=(390.1,238.2,426.7,312.9,352.1,352.2,314.5,277.6),期望特征为f*=(47.67,47.67,464.3,47.67,464.3,464.3,47.67,464.3),3种方法实验结果分析如下.
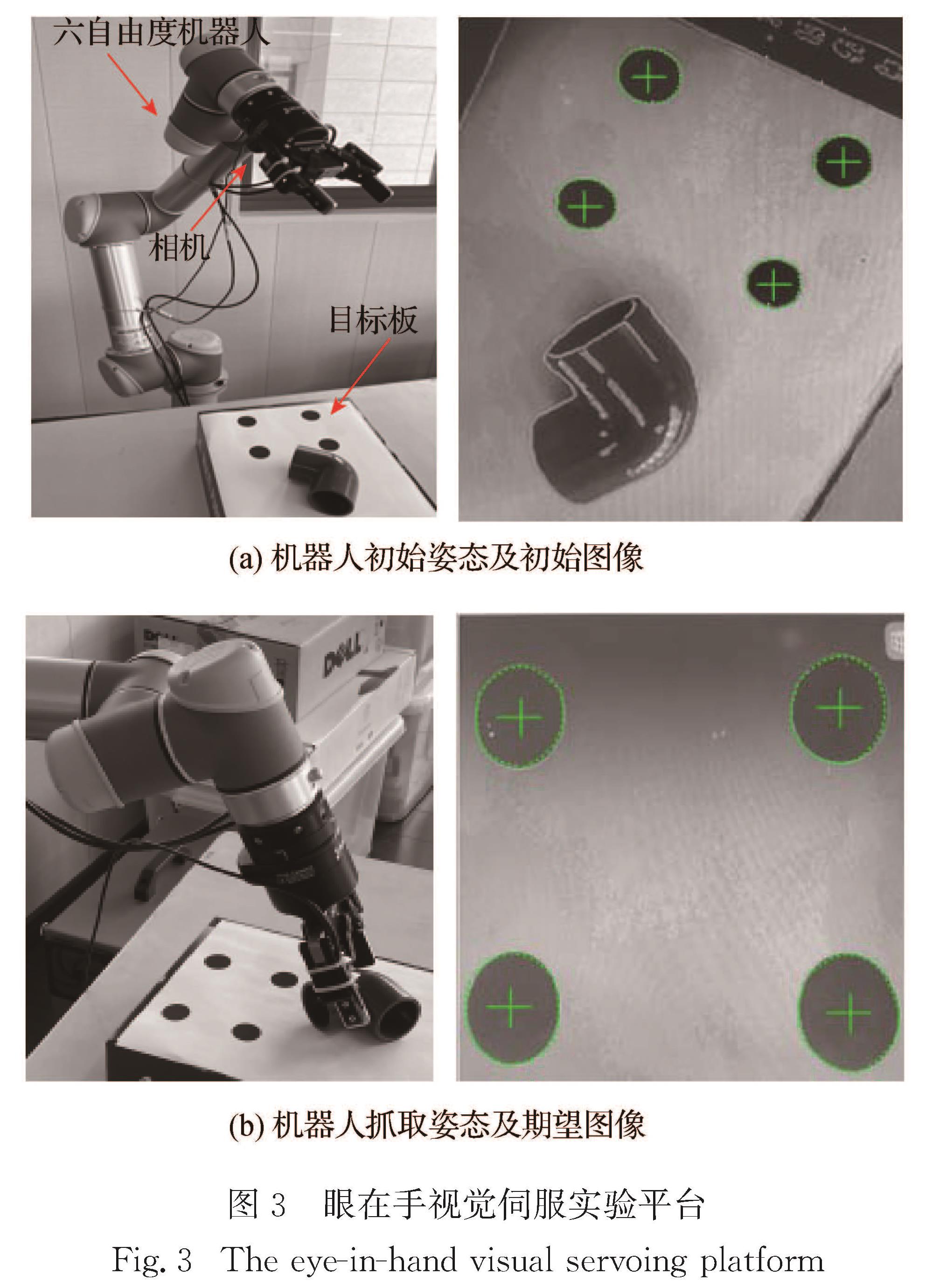
实验1 采用本文基于ADRC雅可比未建模的视觉伺服控制策略.式(26)和(27)中,对其中一个特征点设置如下ADRC控制参数(参数采用经验法设定,其他特征点ADRC参数相同):α2=α3=0.12,α4=0.53,δ2=δ3=0.5,δ4=1,b2=b3=1.43,b4=1.25. 实验结果如图4所示:其中图4(a)为图像特征运动轨迹,图中圆点代表期望特征位置,可以看出图像空间特征轨迹平滑,且稳定在相机的视场范围内,特征点没有偏离视场; 图4(b)为机器人末端抓取定位运动轨迹,可知笛卡尔空间机器人接近以直线的运动方式从初始位姿定位到期望位姿,运动轨迹保持平滑稳定,机器人各关节无冲突,并且没有绕行回退现象发生; 图4(c)为图像特征收敛误差,图4(d)为机器人末端运动速度,结果表明图像特征收敛到期望特征,图像误差一致收敛趋向于0,同时机器人在笛卡尔空间位姿收敛,运动速度无震荡,因此采用ADRC补偿未建模雅可比视觉伺服控制效果良好.
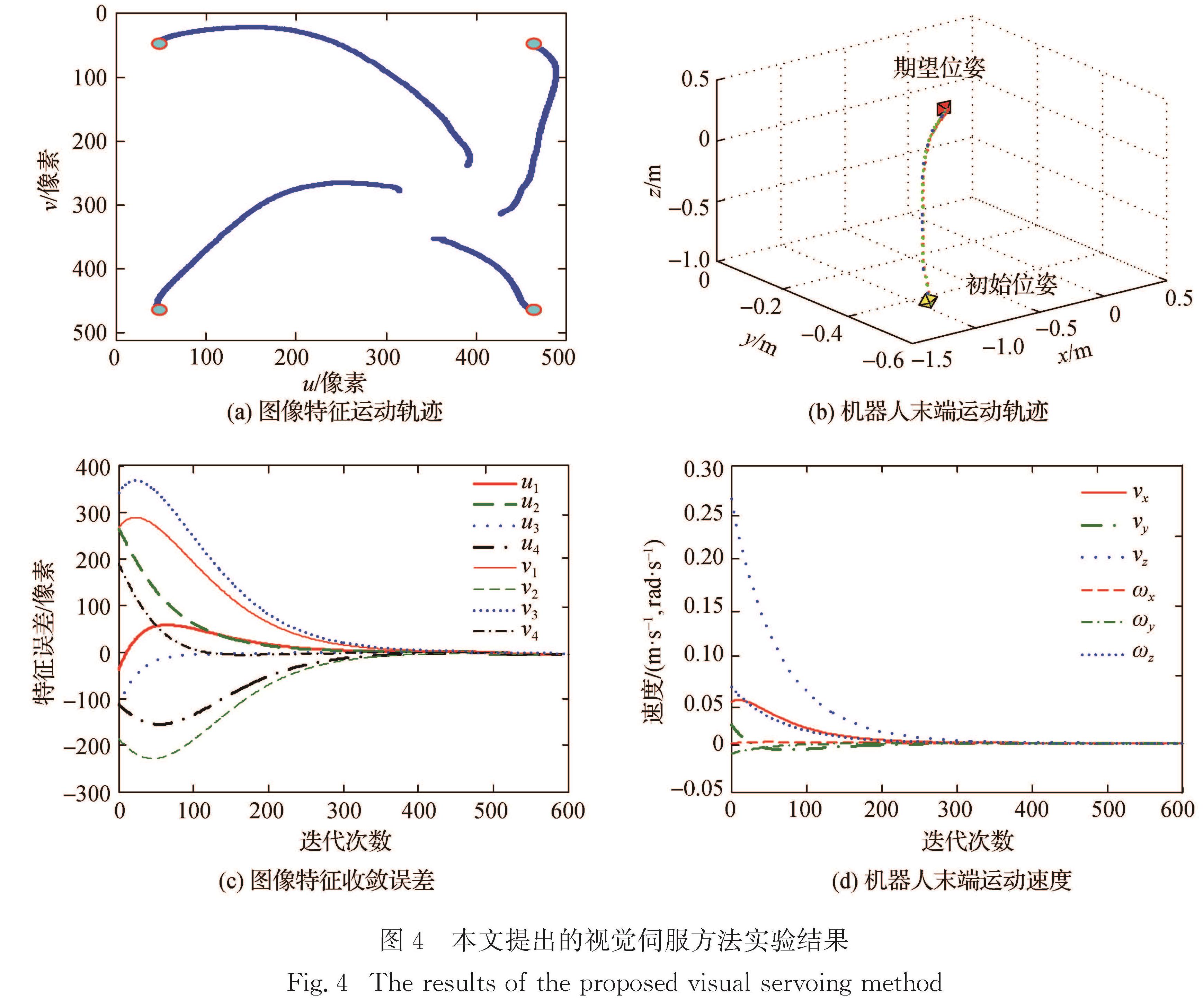
实验2 采用基于KF雅可比估计的IBVS控制方法.实验假设系统过程噪声和观测噪声为高斯白噪声序列,其中过程噪声和观测噪声方差分别选取为Q=0.012×(1 … 0
0 … 1)∈R48×48,R=0.002×(1 … 0
0 … 1)∈R8×8.实验结果如图5所示:其中图5(a)为图像特征运动轨迹,可以看出部分特征点已偏离相机视场范围; 图5(b)为末端抓取定位运动轨迹,与图4(b)相比,可以看出机器人出现轻微的绕行回退现象,机器人运动轨迹呈现弧形; 图5(c)为图像特征收敛误差,对比图4(c)可知图像误差收敛速度不如本文方法; 图5(d)为机器人末端运动速度,与图4(d)相比可以看出机器人出现轻微震动,运动速度收敛效果不如本文研究方法. 其本质原因是该方法需要在线递推估计每一时刻的雅可比,估计精度直接影响系统性能.
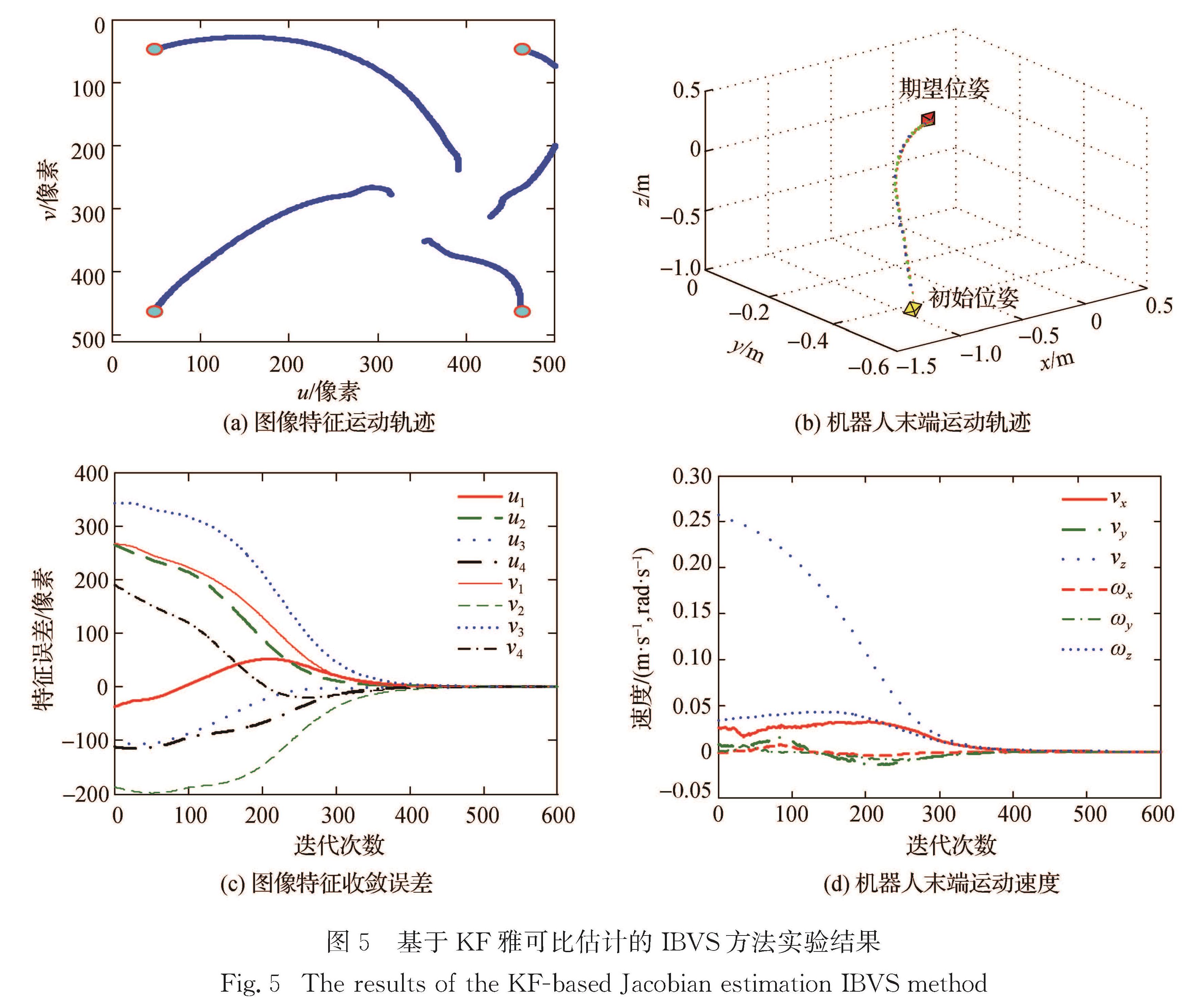
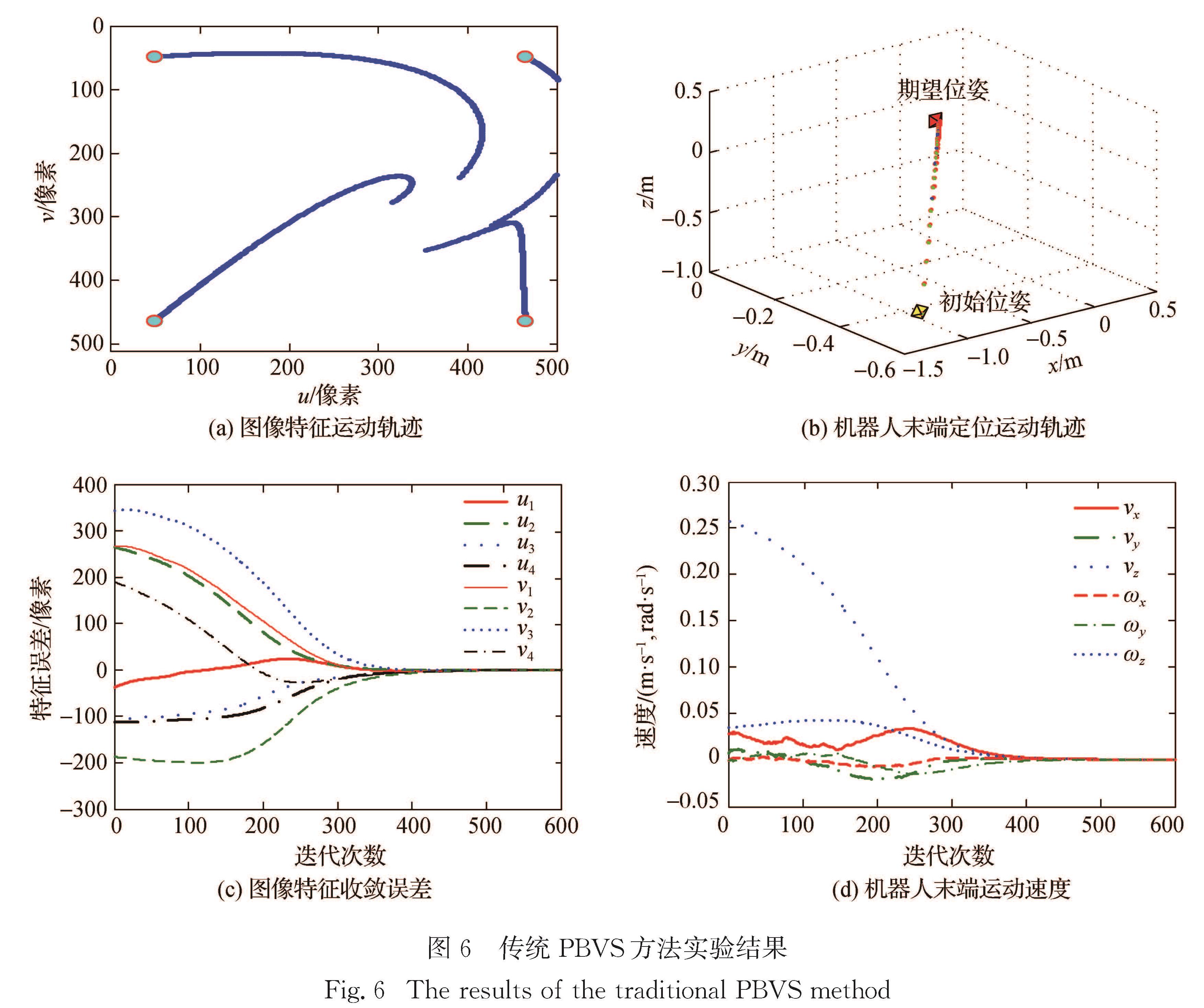
实验3 采用传统PBVS的伺服控制方法.PBVS方法需要相机标定参数,参数包括图像中心u0=v0=256,相机焦距λku=λkv=1 000,其中ku、kv分别为图像u、v轴方向上的比例因子.测试结果如图6所示:其中图6(a)为图像特征运动轨迹,可以看出图像运动轨迹扭曲,特征点严重偏离相机视场范围; 图6(b)为机器人末端抓取定位运动轨迹,由于PBVS方法
图4 本文提出的视觉伺服方法实验结果
Fig.4 The results of the proposed visual servoing method
图5 基于KF雅可比估计的IBVS方法实验结果
Fig.5 The results of the KF-based Jacobian estimation IBVS method
图6 传统PBVS方法实验结果
Fig.6 The results of the traditional PBVS method
直接对机器人运动实施控制,所以笛卡尔空间机器人运动轨迹以直线的方式定位到期望位姿,但是与4(b)相比,机器人运动在初始阶段数据点密集,说明震荡较大,而且直线运动存在关节受限的风险; 图6(c)为图像特征收敛误差,图6(d)为机器人末端运动速度,结果可看出,与基于KF方法相似,收敛效果不及本文提出的视觉伺服控制方案.
综上实验结果,与传统KF和PBVS相比,本文采用基于ADRC补偿的雅可比未建模视觉伺服控制方法性能优越,图像特征运动轨迹平滑稳定在相机视场范围内,且机器人末端运动轨迹平稳无震荡回退,机器人在视觉空间中的稳态误差在10个像素范围内,定位精度高.这主要原因有两个:一方面ADRC降低了由雅可比计算精度带来的系统内扰; 另一方面雅可比计算误差通过ESO和NLSEF实现了非线性状态反馈补偿.本文采用的状态误差反馈补偿方案是一种改善图像特征运动轨迹和机器人末端运动轨迹、提高伺服控制系统性能的有效手段.