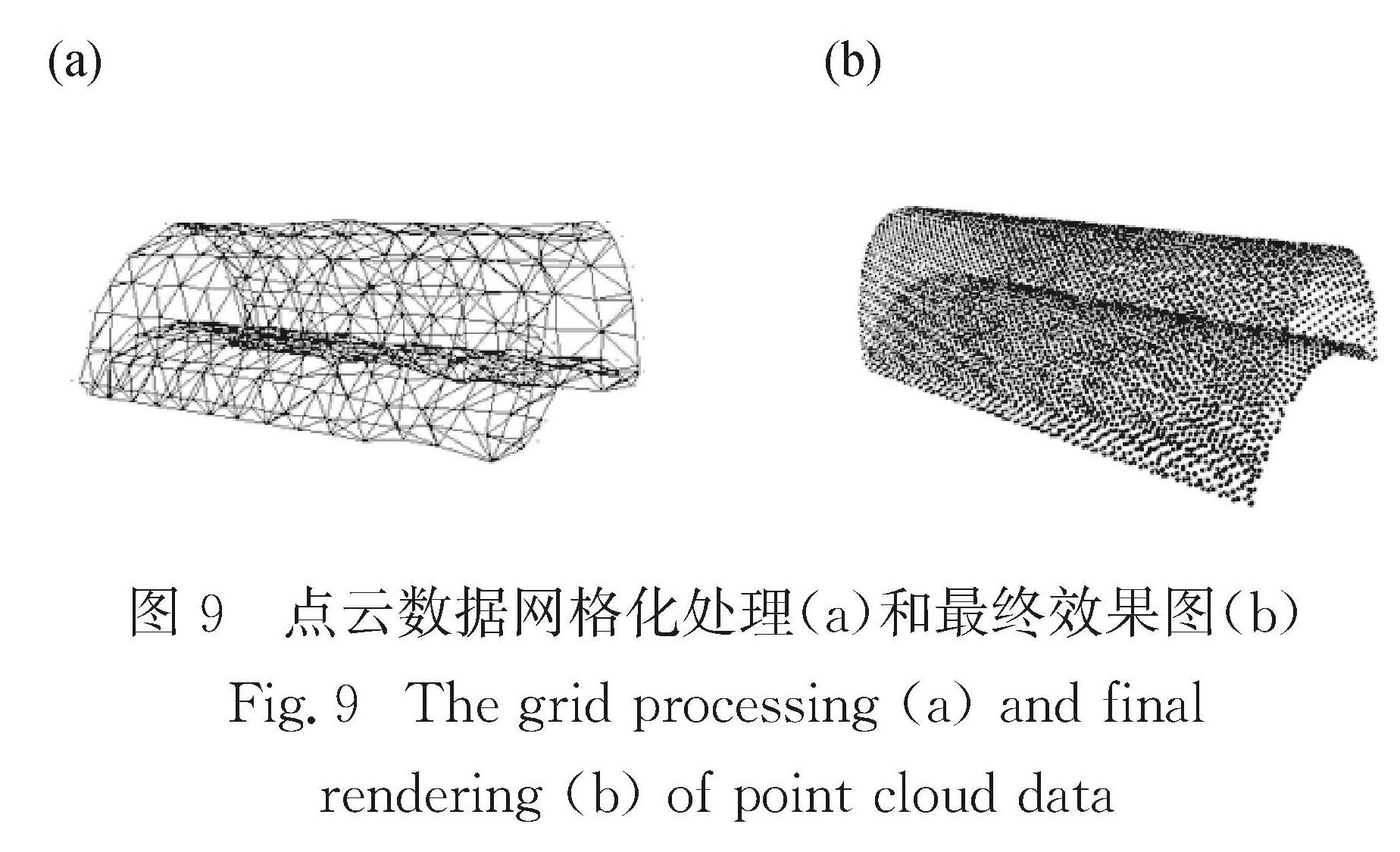
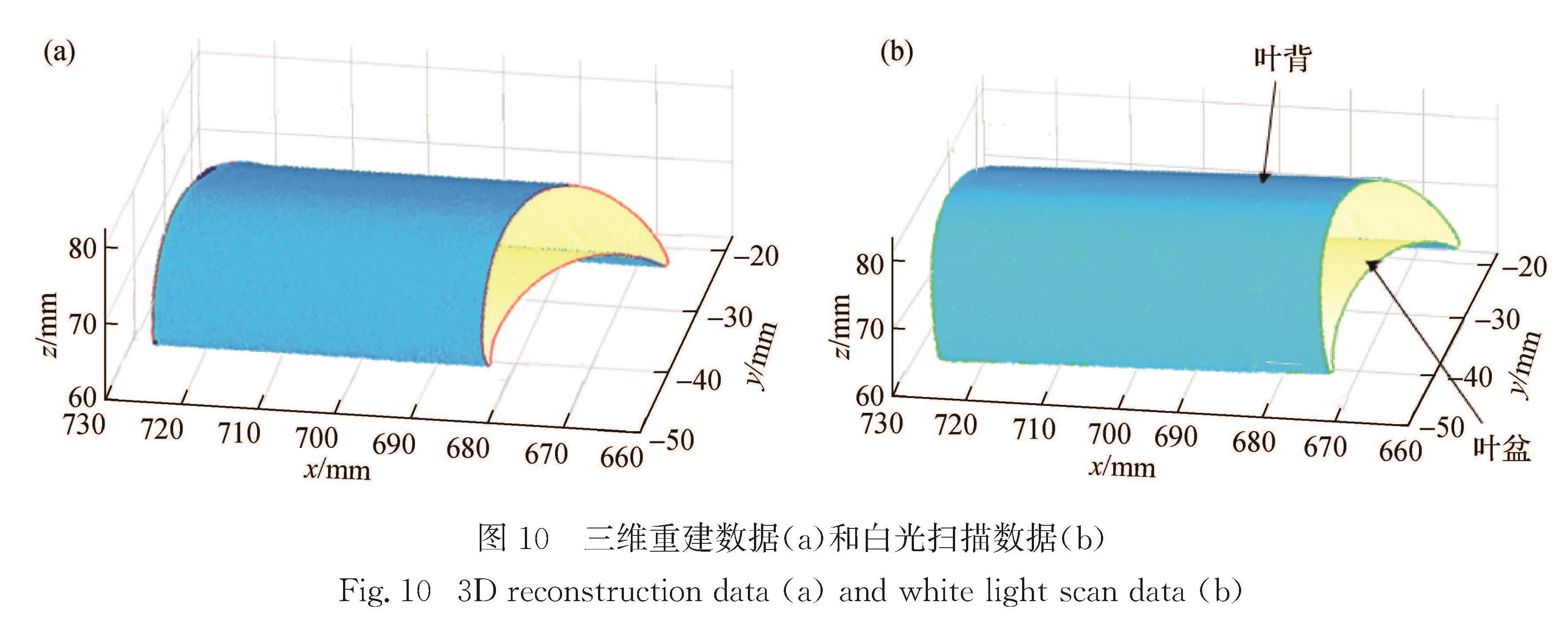
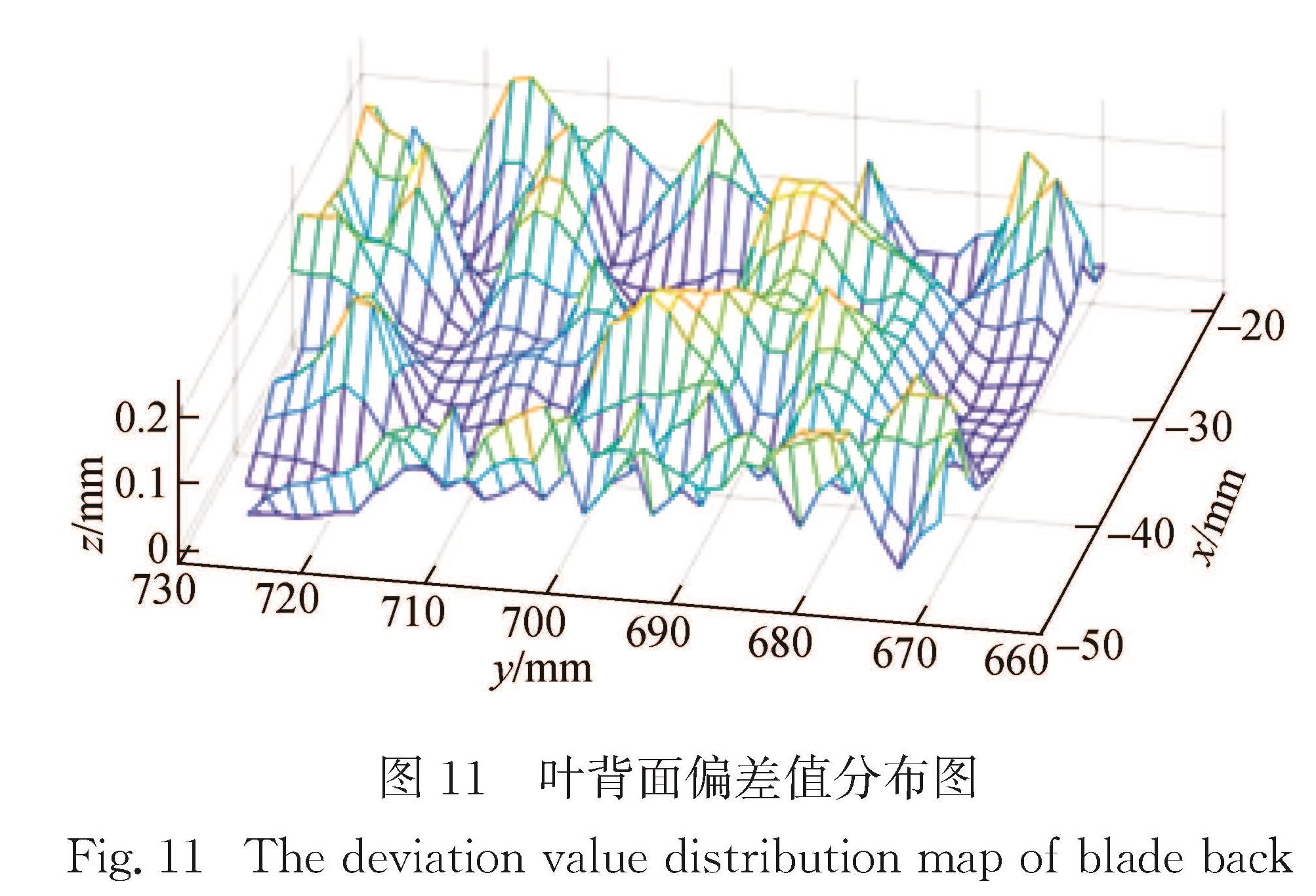
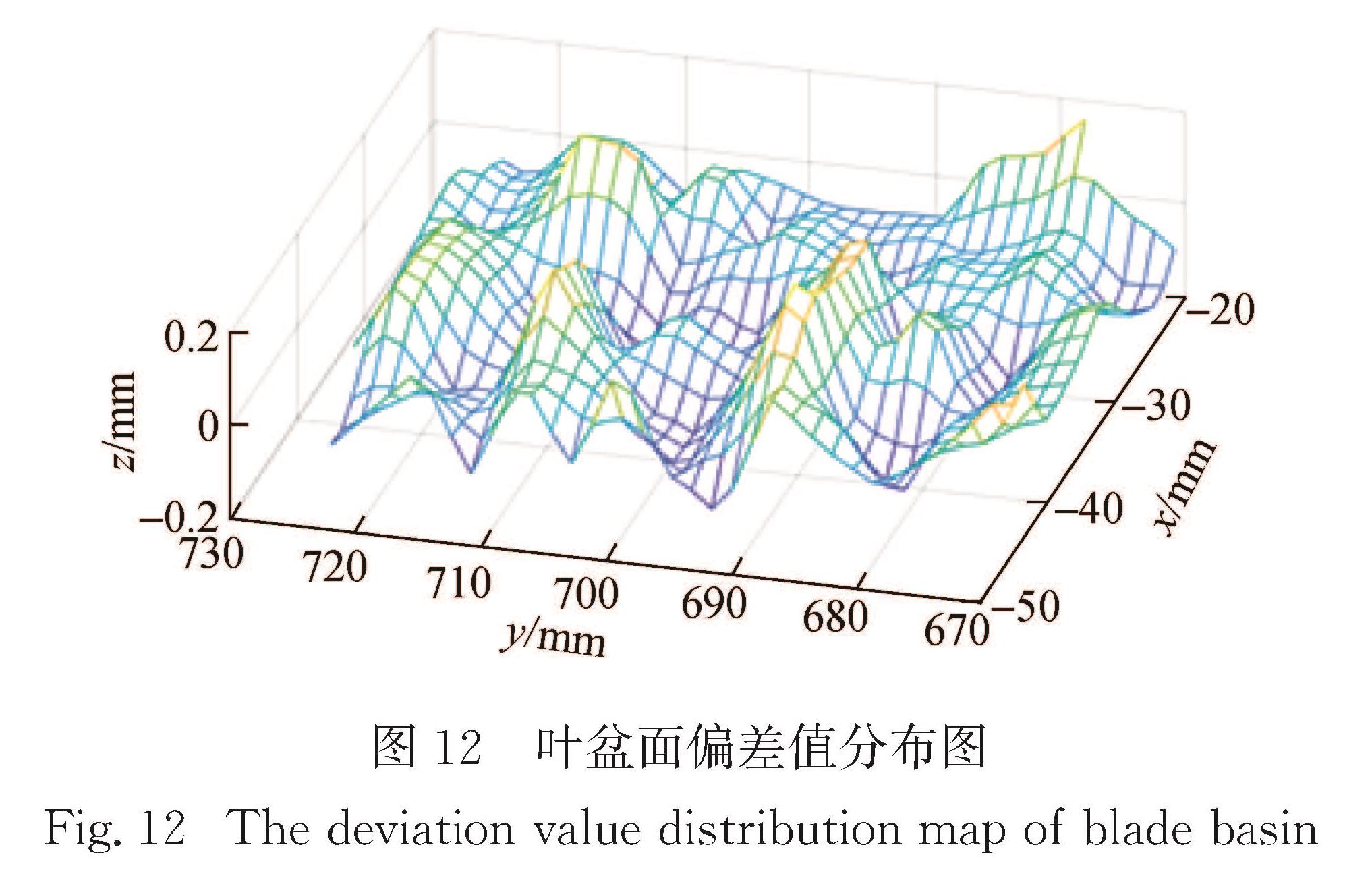
航空发动机叶片三维面形数据重建是评价发动机叶片加工精度的重要手段.提出一种基于增强特征信息的双目视觉三维重建方法:首先在发动机叶片表面张贴圆形标记以增强叶片表面特征信息; 其次通过相机的多角度拍摄获得能够覆盖叶片全貌的图片,并利用圆心特征匹配算法实现左、右图片中对应的圆形标记点的匹配; 最后利用双目视觉三维重建原理计算得到三维点云数据,从而重构发动机叶片面形.对重构后的发动机叶片三维数据与白光扫描设备(精度0.05 mm)所得的扫描数据进行对比可得,发动机单叶片的叶背、叶盆的偏差平均值分别为0.103 2和-0.101 4 mm,标准偏差分别为0.096 6和0.057 1 mm.
Objectives: The engine supplies the main source of power for aircrafts. As an important part of the engine, the processing-quality problem of engine blades has been widely concerned worldwide. In the process of machining, the 3-D geometry information of engine blades must be strictly checked and controlled to ensure the efficiency and the safety of the engine. Therefore, measuring the complete 3-D shape of the blade accurately and then obtaining its 3-D digital morphology data constitute important tasks for the further optimal design and machining of impeller blades.
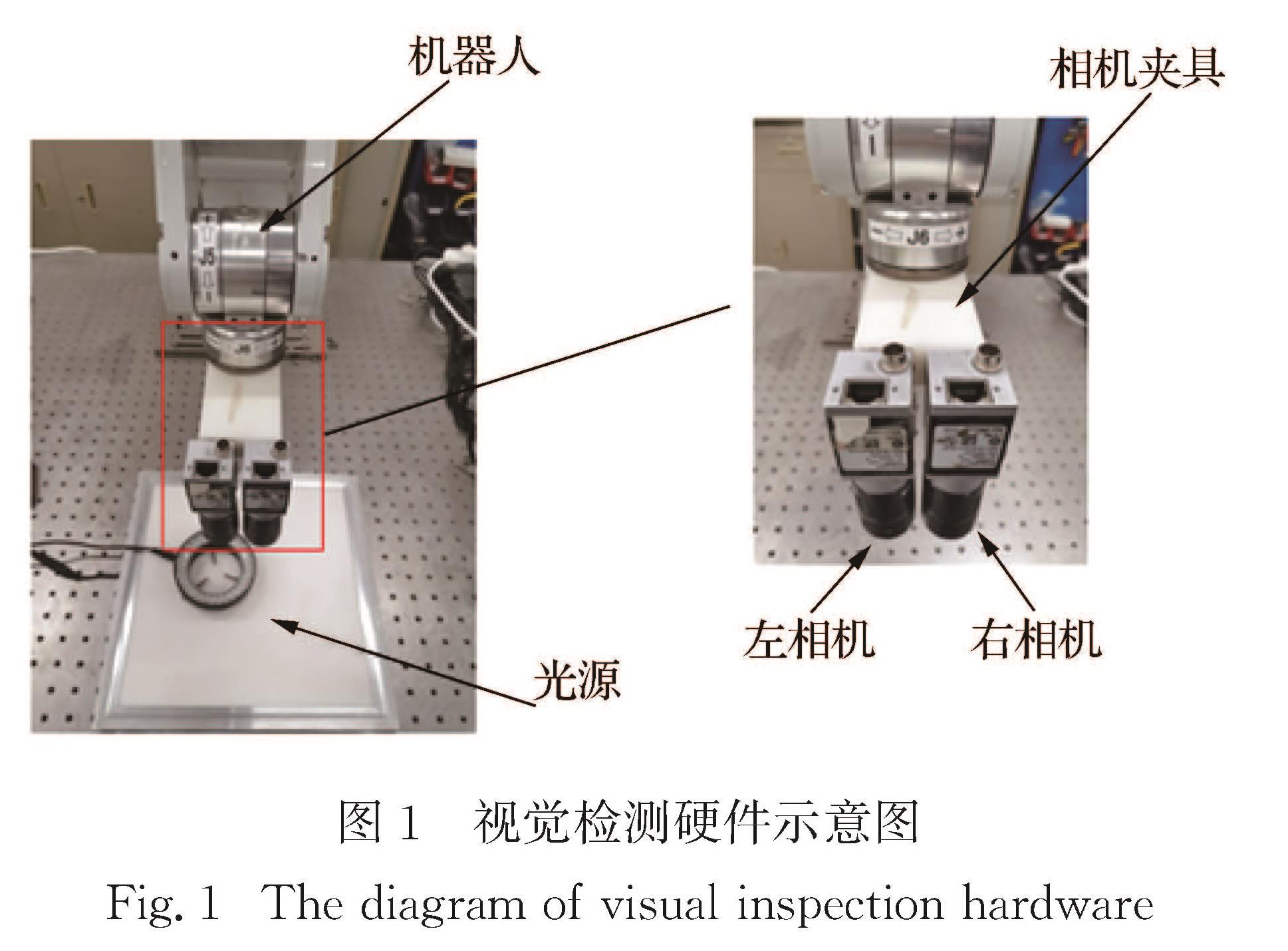
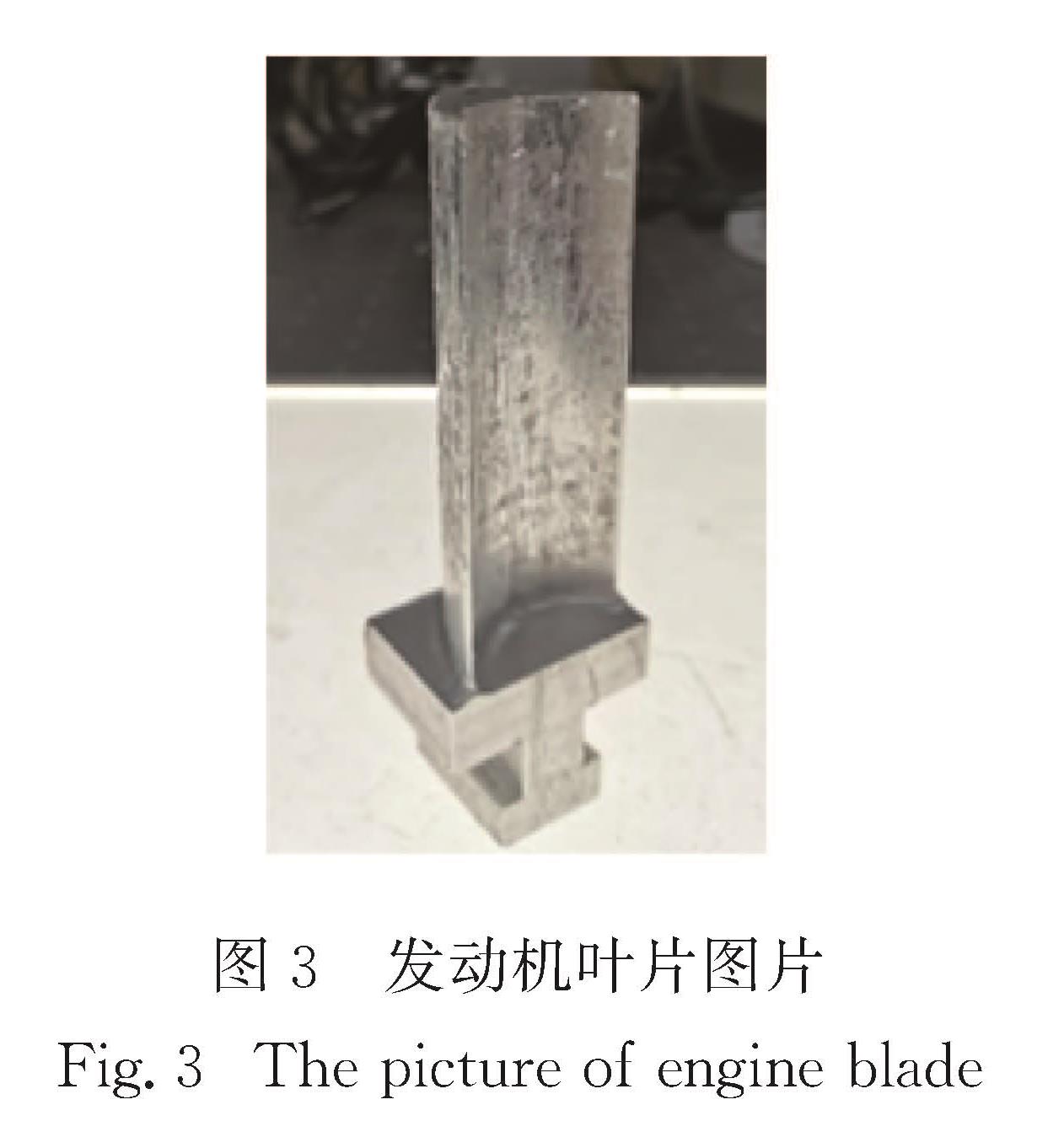
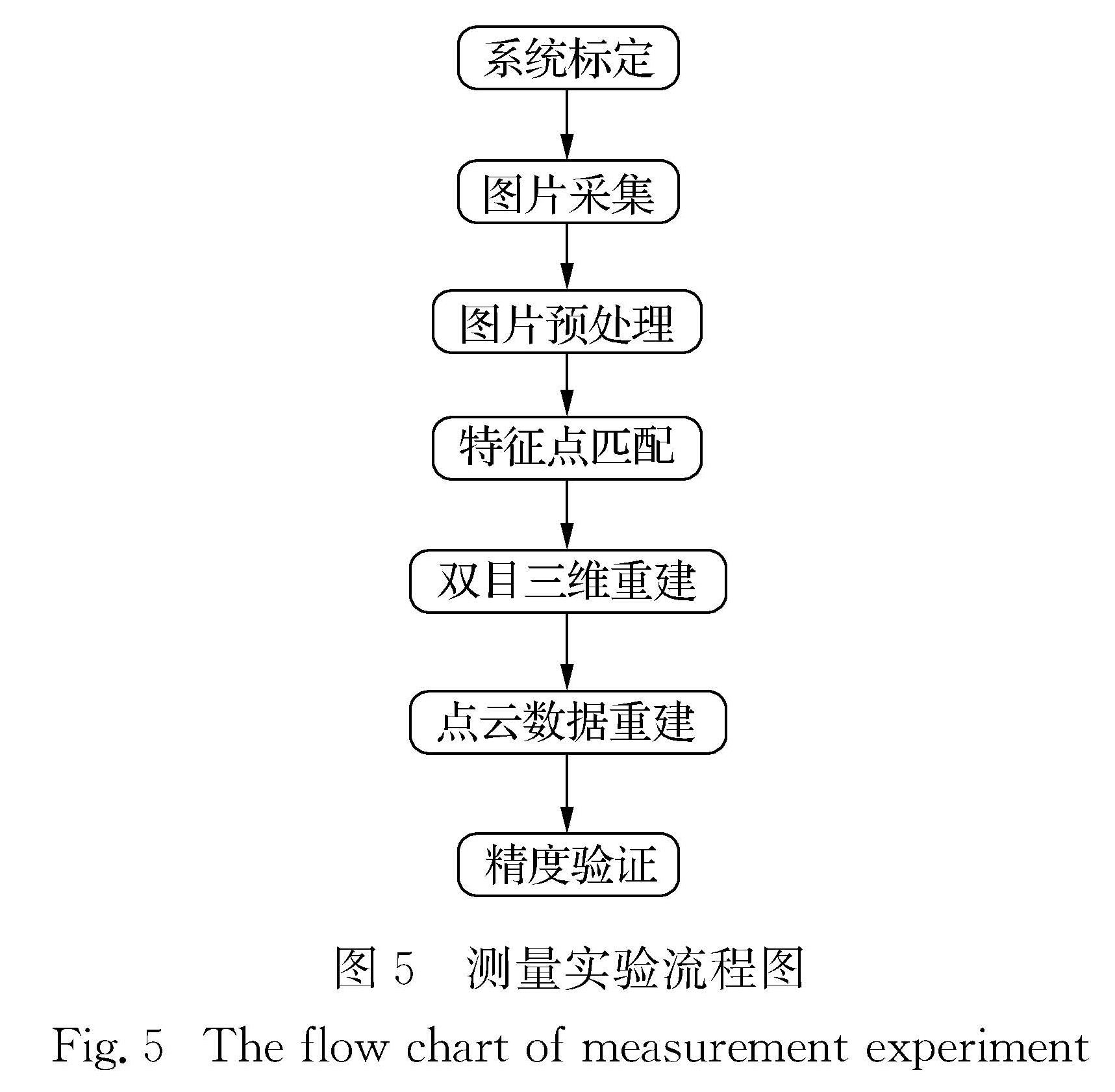
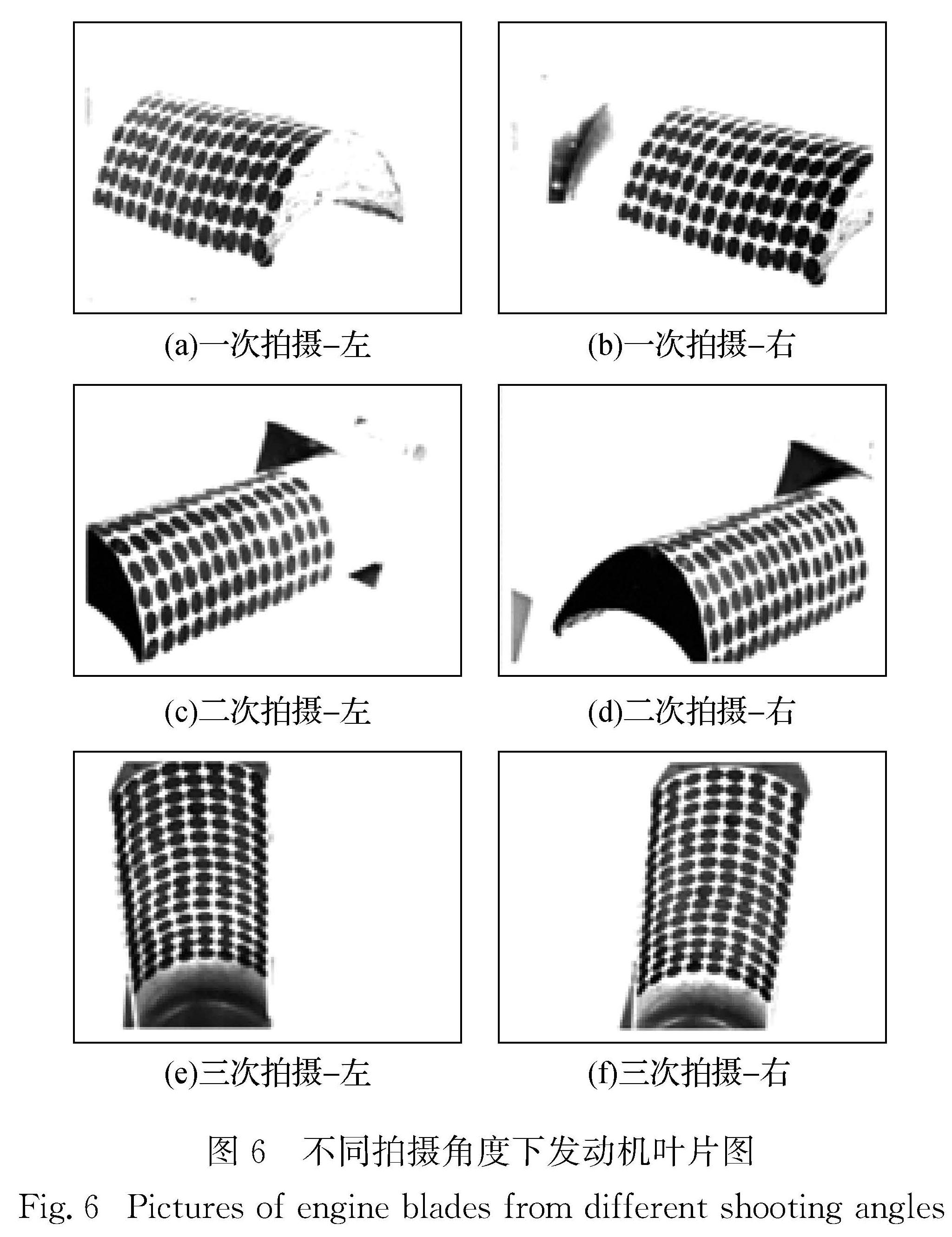
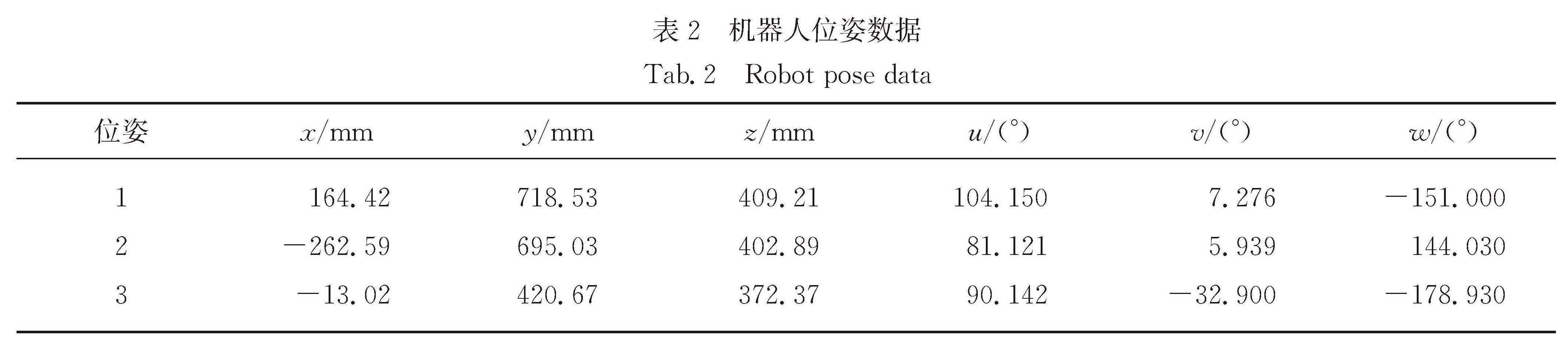
Methods : Currently, due to the existence of technical difficulties in measurements of engine blades, a detection scheme based on the binocular-vision measurement for the centrifugal impeller is proposed. The binocular-vision measurement system is primarily composed of two Basler cameras and an Asea Brown Boveri (ABB) robot, while the single engine blade is taken as the study object. The robot can move to control cameras to shoot the engine blade from different angles. Photos is processed in order to obtain the feature information of the engine blade, then the vision measurement of the engine blade was attained by using the multi-view 3D reconstruction principle. Finally, the validity of the vision measurement is confirmed.
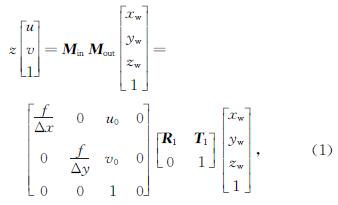
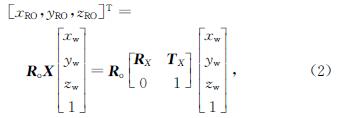
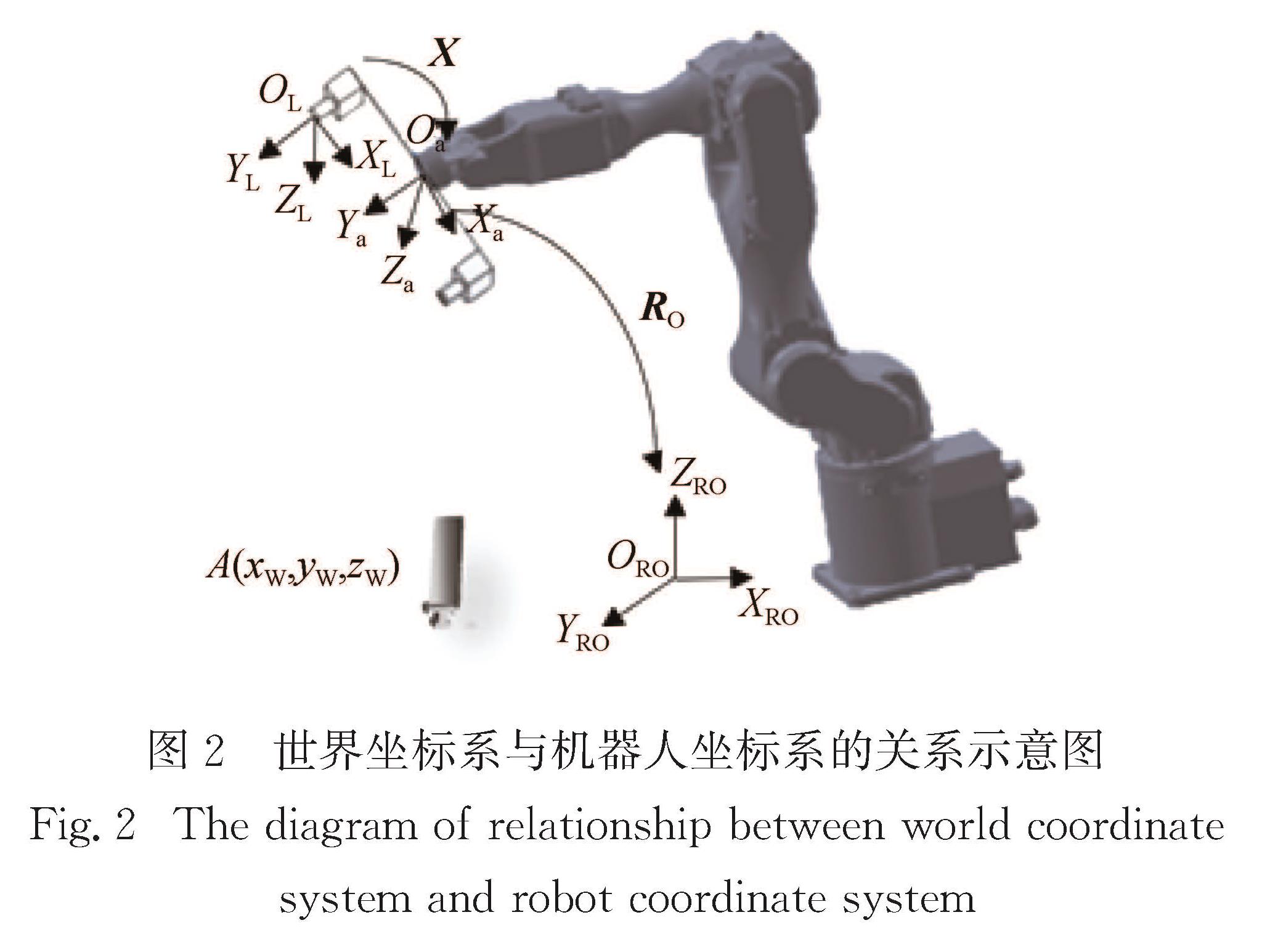
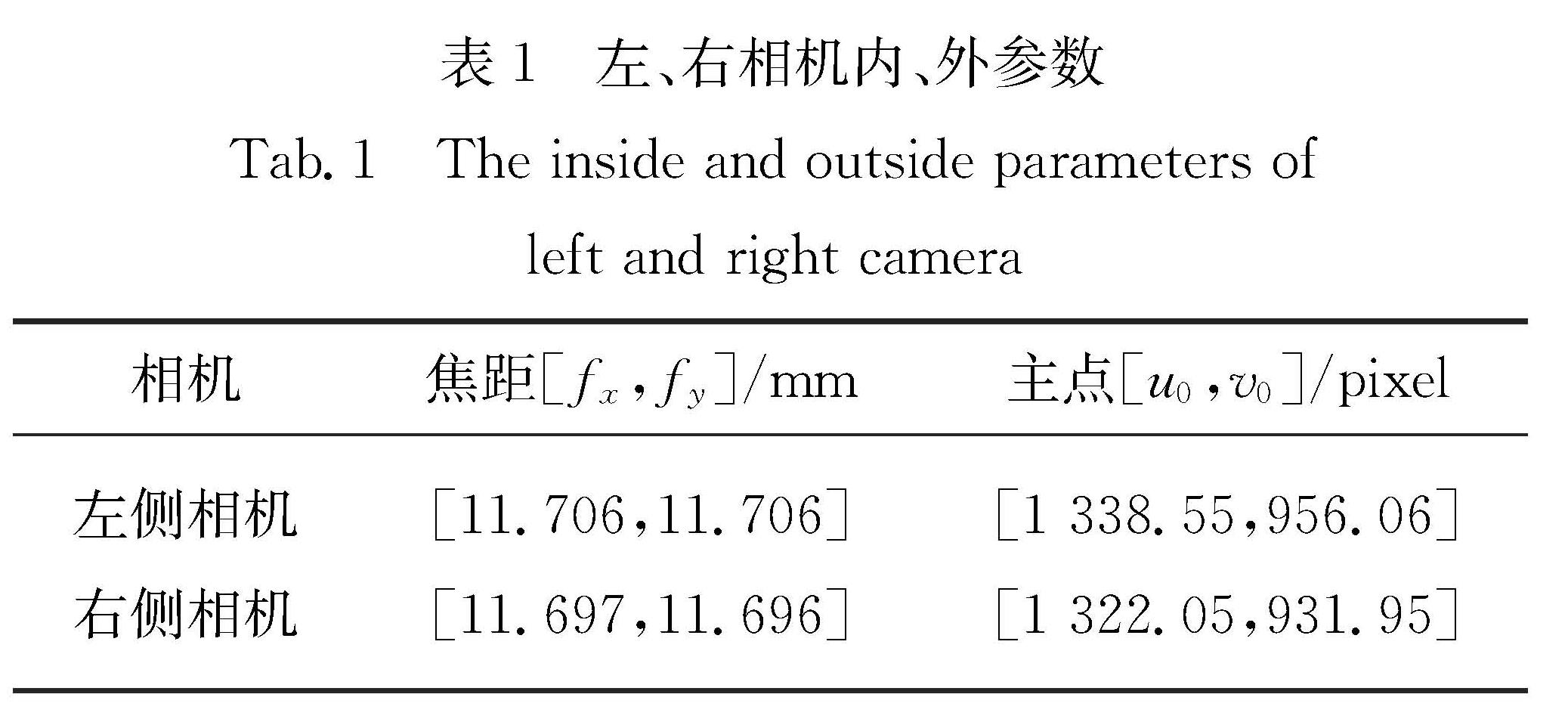
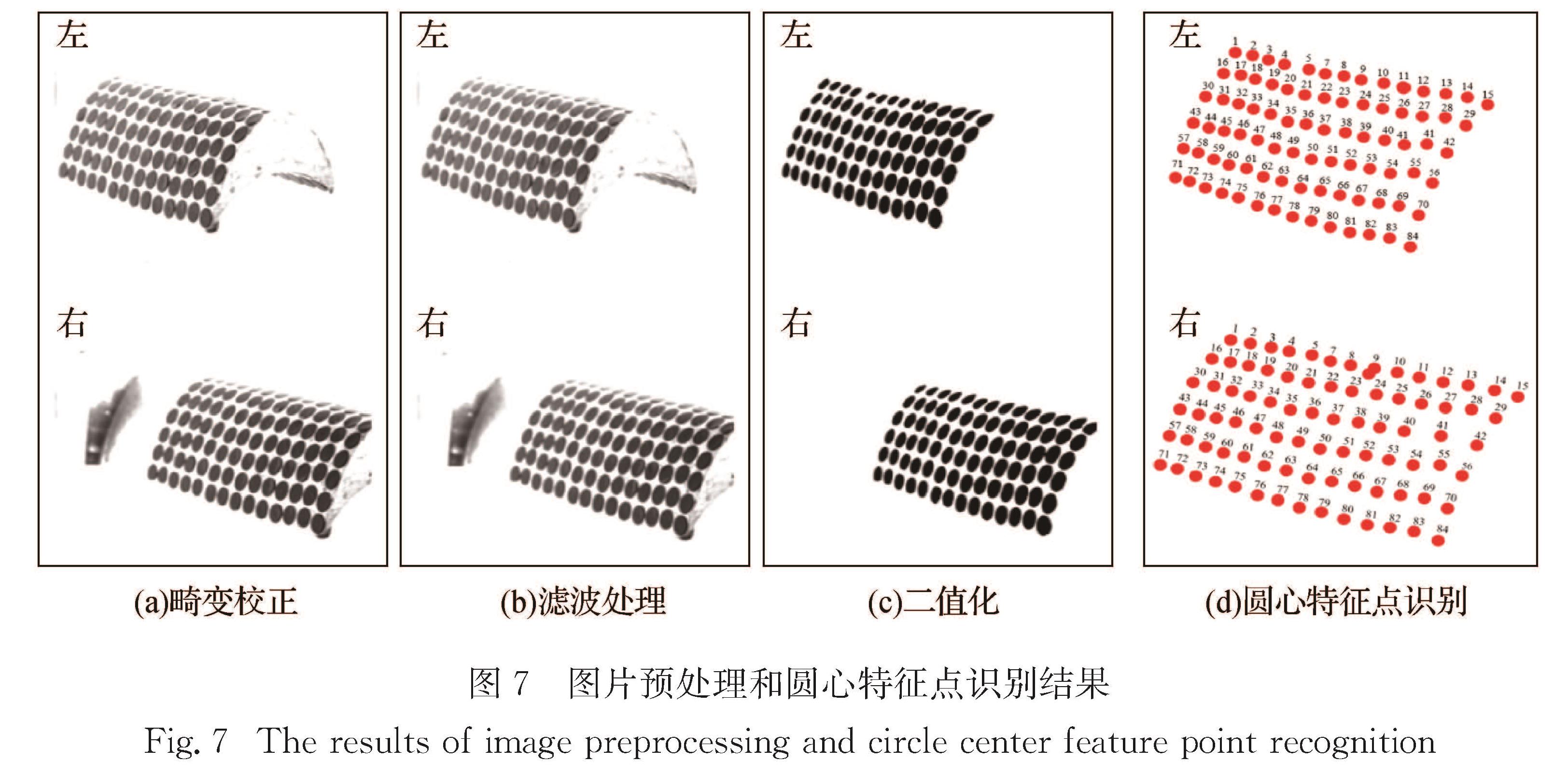
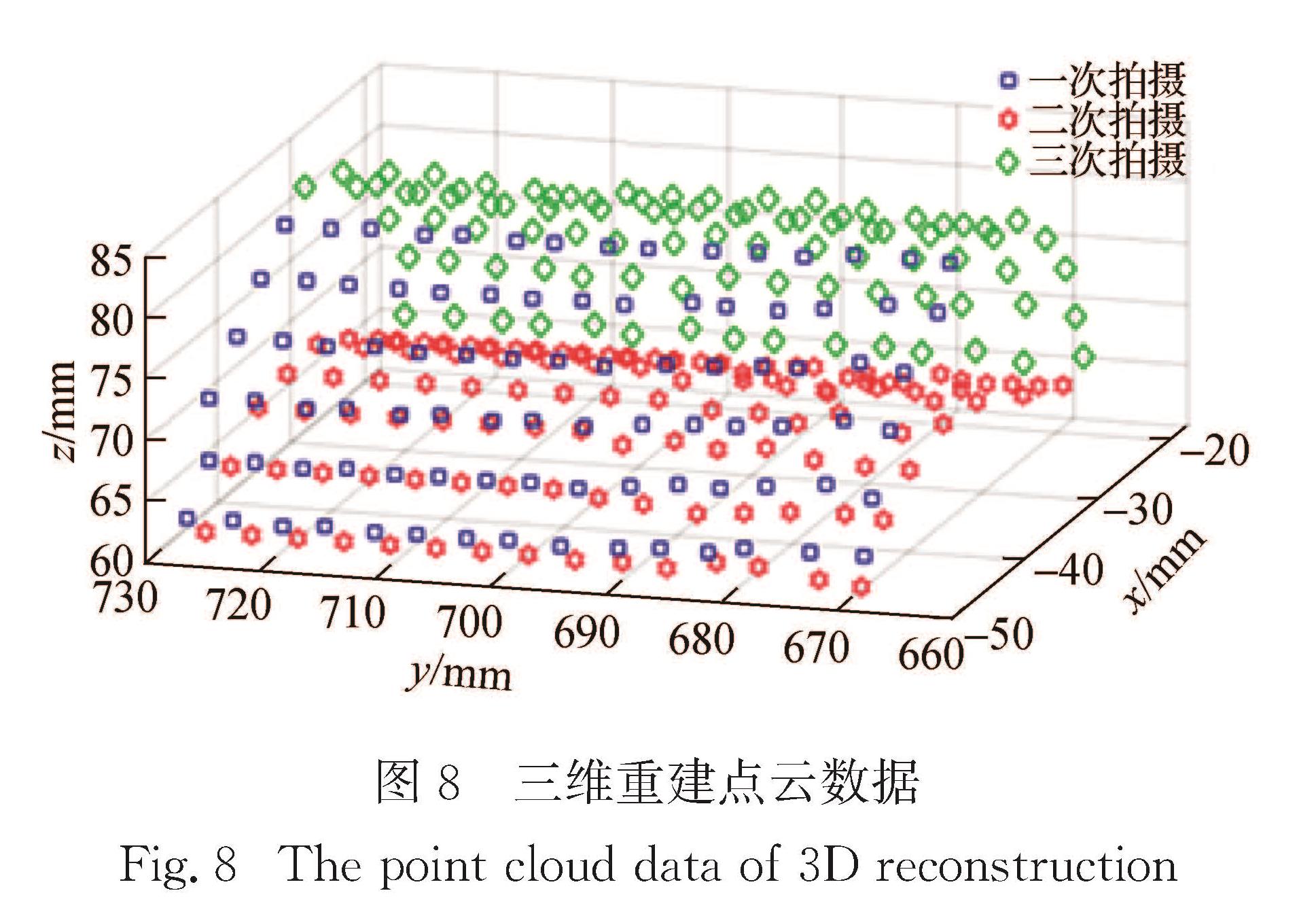
Results : First, the principle and the theoretical model of binocular stereo camera calibration were studied in detail. In this study, we completed the camera calibration work of inside and outside parameters based on the MATLAB computer vision toolbox. The position and pose transformation relationship between the camera and the robot was obtained through hand-eye calibration, so the mathematical transformation relationship between the camera coordinate system and the robot coordinate system would be established. Second, we have established an effective model of binocular stereo vision and made related experiment. A kind of feature recognition algorithm based on the center of a circle was proposed. Circular marks were posted on the surface of the engine blade to enhance the blade surface feature information. Pictures covering the whole picture of the blade were obtained through multi-angle shooting of the cameras and the center feature matching algorithm was used to match the corresponding circular markers on the left and right pictures. Finally, the 3D point cloud data were obtained by using the 3D reconstruction principle of binocular vision. These 3D data of engine blade were compared with the scanning data obtained by the commercial white light scanning equipment (the accuracy is 0.05 mm). For positive and negative sides of the model, the average deviation reached 0.1032 mm and -0.101 4 mm, and the standard deviation reached 0.096 6 mm and 0.057 1 mm respectively. The visual measurement method can be simply and readily used with low costs of the measuring equipment. In addition, this method can quickly measure the blade after rough machining and obtain the machining error data, so that problems can be timely found and data support for the next finishing machining can be provided.
Conclusions: Aiming at the 3-D reconstruction of engine blade, we herein propose a binocular vision measurement method of engine blade based on enhanced feature information and draw following conclusions. (1) The hardware system based on binocular vision imaging was designed to ensure acquisition of high-quality image. (2)The feature information of the blade surface was enhanced by posting circular marks on the blade surface in the case of engine blades are not obvious, and the feature matching method based on the center of the circle was proposed to realize the extraction of the feature points corresponding to the left and right pictures. (3) The overall 3-D reconstruction of the leaves was completed. By comparing errors with the model data obtained from scanning, the result meets the requirement.
Methods : Currently, due to the existence of technical difficulties in measurements of engine blades, a detection scheme based on the binocular-vision measurement for the centrifugal impeller is proposed. The binocular-vision measurement system is primarily composed of two Basler cameras and an Asea Brown Boveri (ABB) robot, while the single engine blade is taken as the study object. The robot can move to control cameras to shoot the engine blade from different angles. Photos is processed in order to obtain the feature information of the engine blade, then the vision measurement of the engine blade was attained by using the multi-view 3D reconstruction principle. Finally, the validity of the vision measurement is confirmed.
Results : First, the principle and the theoretical model of binocular stereo camera calibration were studied in detail. In this study, we completed the camera calibration work of inside and outside parameters based on the MATLAB computer vision toolbox. The position and pose transformation relationship between the camera and the robot was obtained through hand-eye calibration, so the mathematical transformation relationship between the camera coordinate system and the robot coordinate system would be established. Second, we have established an effective model of binocular stereo vision and made related experiment. A kind of feature recognition algorithm based on the center of a circle was proposed. Circular marks were posted on the surface of the engine blade to enhance the blade surface feature information. Pictures covering the whole picture of the blade were obtained through multi-angle shooting of the cameras and the center feature matching algorithm was used to match the corresponding circular markers on the left and right pictures. Finally, the 3D point cloud data were obtained by using the 3D reconstruction principle of binocular vision. These 3D data of engine blade were compared with the scanning data obtained by the commercial white light scanning equipment (the accuracy is 0.05 mm). For positive and negative sides of the model, the average deviation reached 0.1032 mm and -0.101 4 mm, and the standard deviation reached 0.096 6 mm and 0.057 1 mm respectively. The visual measurement method can be simply and readily used with low costs of the measuring equipment. In addition, this method can quickly measure the blade after rough machining and obtain the machining error data, so that problems can be timely found and data support for the next finishing machining can be provided.
Conclusions: Aiming at the 3-D reconstruction of engine blade, we herein propose a binocular vision measurement method of engine blade based on enhanced feature information and draw following conclusions. (1) The hardware system based on binocular vision imaging was designed to ensure acquisition of high-quality image. (2)The feature information of the blade surface was enhanced by posting circular marks on the blade surface in the case of engine blades are not obvious, and the feature matching method based on the center of the circle was proposed to realize the extraction of the feature points corresponding to the left and right pictures. (3) The overall 3-D reconstruction of the leaves was completed. By comparing errors with the model data obtained from scanning, the result meets the requirement.