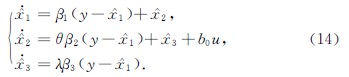
线性扩张状态观测器(linear extended state observer,LESO)是线性自抗扰控制(linear active disturbance rejection control,LADRC)的核心部件,其自身性能对控制效果至关重要.通过增加两个调节因子,对二阶系统LADRC的LESO性能进行改进.改进后的LESO(improved LESO,ILESO)可以根据噪声频率和扰动跟踪误差精度的需要,灵活调节ILESO的观测器带宽,并且可以进一步提升系统的暂态特性.通过稳态误差分析探讨了ILESO的稳定性条件.利用主导极点的方法分析得到两个调节因子与暂态性能、观测带宽的关系.该方法同样可推广到高阶系统.
As the core component of linear active disturbance rejection control(LADRC),linear extended state observer(LESO)is critically related to the effectiveness of the control. This study improves the performance of the traditional LESO for second-order linear systems by adding two adjustment factors. The improved LESO(ILESO)can flexibly adjust the observer bandwidth according to needs of noise frequency and accuracy of disturbance tracking,thus further improving transient characteristics of the closed-loop system. Stability conditions of ILESO are discussed through steady-state error analyses. The relationship between these two adjustment factors,the transient performance,and the observer bandwidth is obtained by using the dominant pole method,which can also be applied to higher-order systems.