(i)在线性模式下(无饱和环节),闭环系统是稳定的.
注1 假设(i),即控制系统在线性模式下的稳定性要求,是饱和闭环系统稳定性的前提条件,这是容易理解的.假设(iii)是保证其等价Lur'e系统中两个模块R(s)和K(s)各自的稳定性,这是Lur'e系统稳定的前提条件.
2.1 改进圆判据
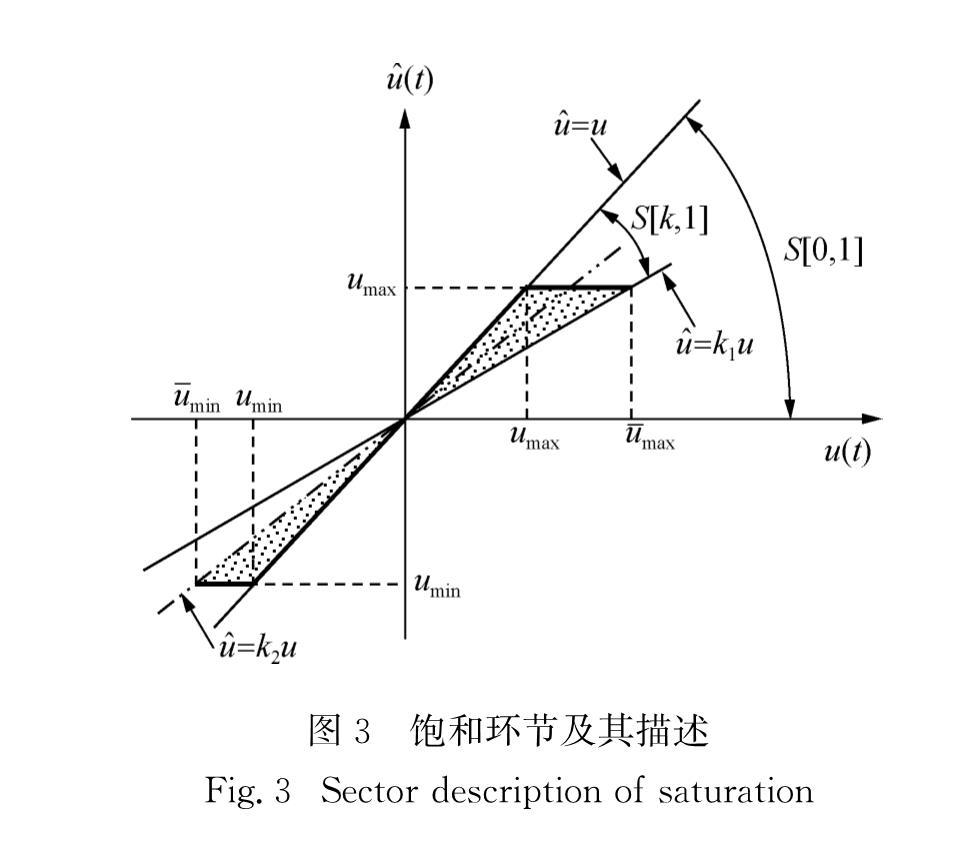
在抗饱和研究中,一般认为控制输入可以达到无穷大,即饱和环节以扇形区域Sat(·)∈S[0,1]表征; 而实际控制系统中物理信号总是有界的,即控制信号满足假设(ii).此时,饱和环节可以用一个紧凑的扇形区域S[k,1]来描述,如图3所示.其中
k=min{k1,k2},(11)
k1和k2是常数且分别满足
umax=k1·u^-max,umin=k2·u^-min.
图3 饱和环节及其描述
Fig.3 Sector description of saturation
需要指出的是,相对于S[0,1],饱和环节的描述S[k,1]意味着显著减少了保守性.基于饱和环节的扇形描述S[k,1],可以得到图1等价的Lur'e系统
Fig.2 Equivalent Lur'e systems of Fig.1">图2饱和系统的稳定性判据,即局部圆判据如下:
引理1 Lur'e型系统的圆判据[22]
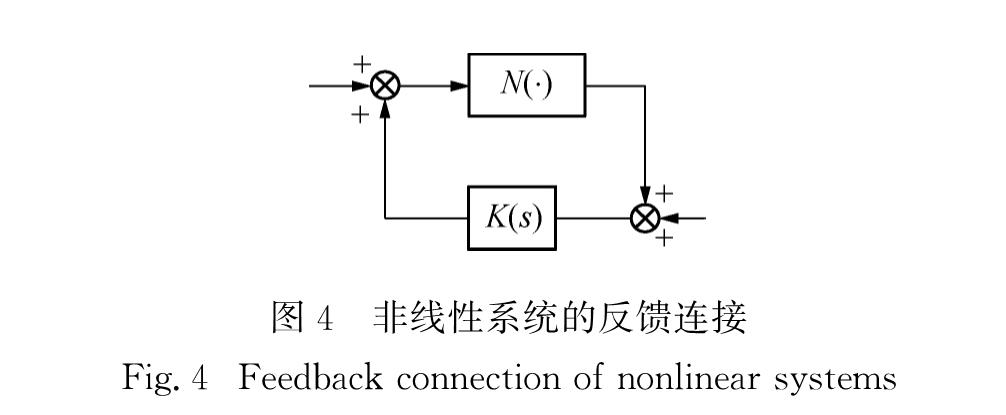
多数非线性物理系统可以表示为一个线性系统K(s)和非线性单元N(·)的反馈连接(如图4所示),且N(·)属于扇形区域S[α,β],如果满足下列条件之一,则系统绝对稳定:
(i)如果0<α<β,K(iω)的奈奎斯特曲线不进入圆盘D(-1/α,-1/β)内,且沿逆时针方向环绕其m次,其中m是K(s)具有正实部的极点数.
(ii)如果0=α<β,K(s)是赫尔维茨的,且K(jω)的奈奎斯特曲线位于直线Re(s)=-1/β的右侧.
(iii)如果α<0<β,K(s)是赫尔维茨的,且K(jω)的奈奎斯特曲线位于圆盘D(-1/α,-1/β)的内部.
图4 非线性系统的反馈连接
Fig.4 Feedback connection of nonlinear systems
定理1(圆判据定理)考虑图1饱和系统及其等价的Lur'e型系统L(Sat(·),K(s))并满足假设条件; 当K(jω)的奈奎斯特曲线不进入圆盘D(-1/k,-1)内,且沿逆时针方向环绕其m次,则闭环系统在局部意义下是绝对稳定的; 其中,m是K(iω)具有正实部的极点数.
证明 定理1满足引理1中的充分条件(i),于是本定理得到证明.
考虑到奈奎斯特图与Nichols图之间的转换关系,在奈奎斯特图实轴上对K(iω)向右做位移为1的平移操作,相应的圆盘变为D(1-1/k,0),这样补偿器的设计会更加直观便利,因此可以得到
Kλ(s)=1+K(s)=(1+P(s)C(s))/(1+H(s)).(12)
可以获得新的圆判据如下:
定理2考虑图1饱和系统及其等价的Lur'e型系统并满足假设条件; 当Kλ(iω)的奈奎斯特曲线不进入圆盘D(1-1/k,0),且沿逆时针方向环绕其m次,则闭环系统在局部意义下是绝对稳定的.
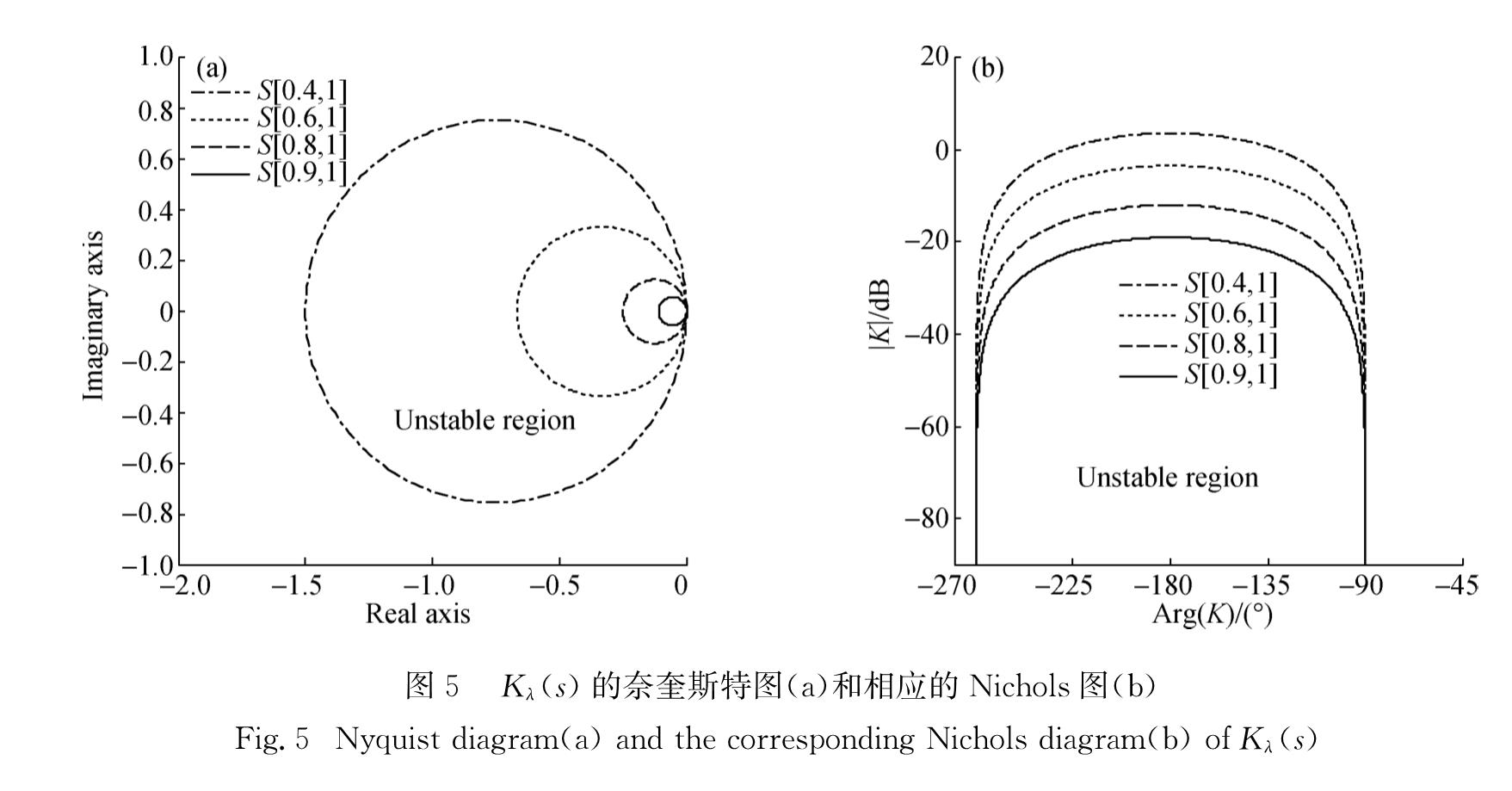
注3 线性部分Kλ(s)由X(s)=1+P(s)C(s)和D(s)=1+H(s)两部分组成,需要设计的补偿器只存在于D(s)中,因此可以通过设计D(s),即补偿器H(s)来调整Kλ(S)的图形,使其落入圆判据所表示的稳定区域内.一般来说,3-DOF抗饱和结构中的H(s)会选择最小相位稳定补偿器,且控制器C(s)中不会包含不稳定的极点,再结合假设条件以及式(12),可知一般情况下Kλ(s)包含了对象P(s)的极点.因此定理2中Kλ(s)的奈奎斯特曲线沿逆时针方向环绕圆盘m次,这也是对象P(s)不稳定极点(具有正实部极点)的个数.对于不同k值,关于Kλ(s)的饱和系统稳定性区域如图5所示,其中图5(b)是对应于图5(a)的Nichols图上的稳定域.
注4 可以看出,实际控制信号u,即饱和环节实际输入信号的不同上界,意味着不同的饱和区域描述k值; 根据定理1或定理2,不同的k值,对应于Nichols图上不同大小的稳定区域:k值越大,意味着由圆盘所定义的不稳定区域越小,即用于设计补偿器的稳定区域越大.本文的饱和区域描述,对应的k值更小,因此所提出的改进圆判据使系统的稳定性区域显著扩大,为补偿器设计提供了更强的灵活性,从而使系统性能得到
图5 Kλ(s)的奈奎斯特图(a)和相应的Nichols图(b)
Fig.5 Nyquist diagram(a)and the corresponding Nichols diagram(b)of Kλ(s)
进一步改善; 同时也减少了补偿器设计的保守性,图形化的设计方法更具直观性,为鲁棒抗饱和补偿器设计问题提供了一种更好的解决方案.
2.2 补偿器设计具体步骤
基于上述稳定性判据,补偿器设计之前,事先需要完成两项工作:
(i)在线性状态(即不考虑饱和环节)下的控制器C(s)设计;
(ii)根据现场信息或以往经验,初步确定饱和环节描述中所对应的k值.
事实上,完成补偿器的设计过程如下:
1)在满足假设条件的情况下,不考虑饱和环节,根据线性系统的性能要求设计控制器C(s)和前置滤波器F(s);
2)根据实际系统的运行情况和先验知识决定参数k的值;
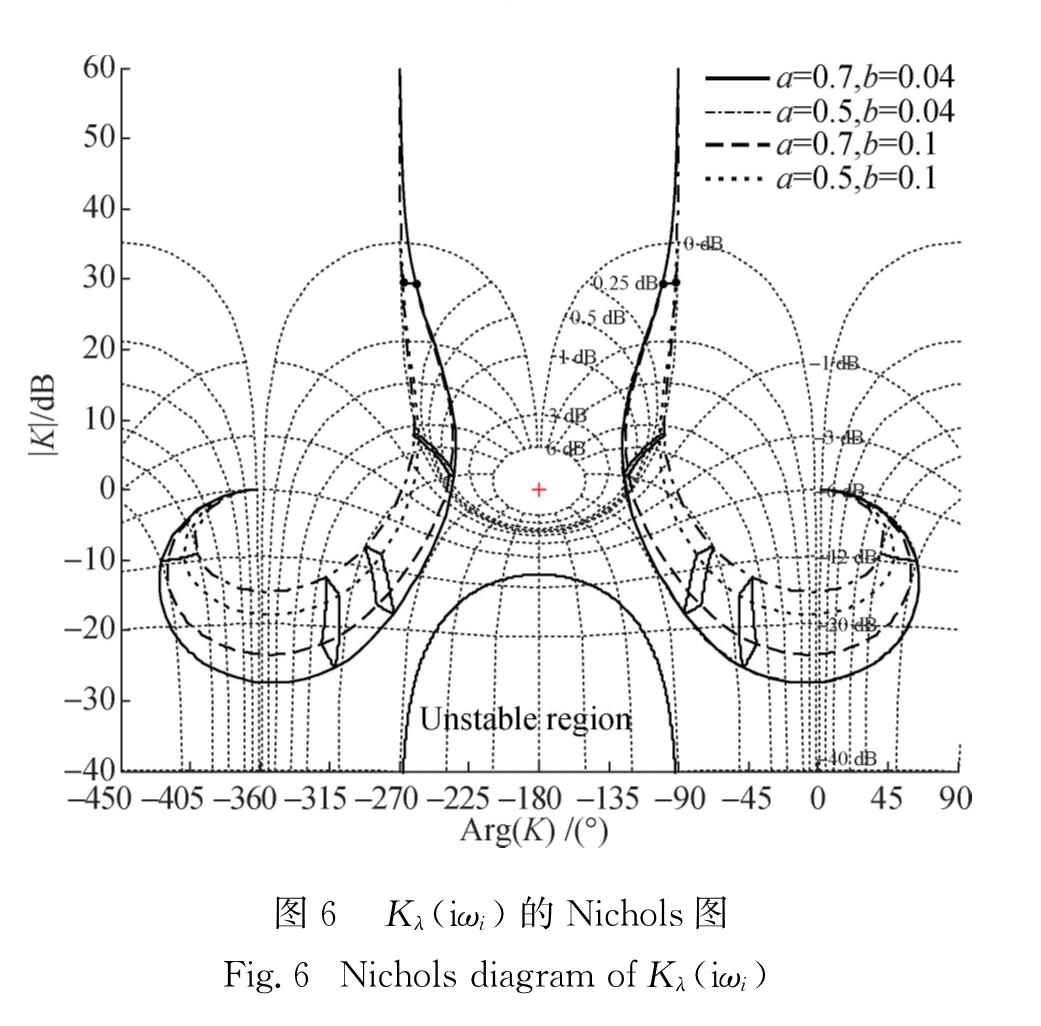
3)在Nichols图上的一系列频率点W处画出相对于系统线性部分Kλ(iωi)的稳定性区域,其中W={ω1,ω2,…,ωn};
4)初始化补偿器H(s)的参数,在同一张Nichols图上画出Kλ(iωi)对象的模板;
5)设计补偿器H(s)确保Kλ(iωi)的模板在稳定区域内.如果不是,则调整补偿器的参数/形式使Kλ(iωi)的模板回到对应的稳定区域内.
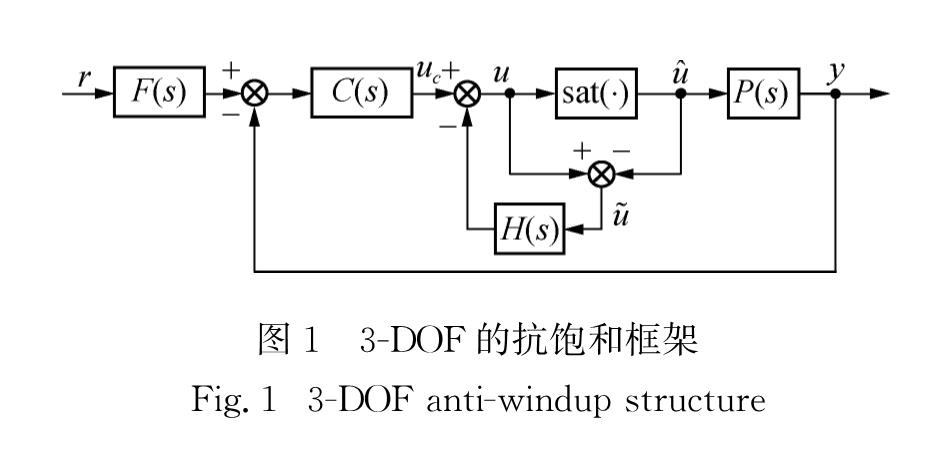
 图1等价的Lur'e系统
图1等价的Lur'e系统