收稿日期:20180808 录用日期:20190308
< br/>基金项目:国家重点研发计划(2016YFB0100900); 国家自然科学基金(61304193); 福建省自然科学基金(2017J01100); 深圳市科技计划基础研究项目(JCYJ20180306172720364)
< br/>通信作者:guojh@xmu.edu.cn < br/>
< br/>通信作者:guojh@xmu.edu.cn < br/>
(1.厦门大学航空航天学院,福建 厦门 361102; 2.厦门大学深圳研究院,广东 深圳 518057)
(1.School of Aerospace Engineering,Xiamen University,Xiamen 361102,China;2.Shenzhen Research Institute of Xiamen University,Shenzhen518057,China)
intelligent electric vehicles (IEV);longitudinal motion;hierarchical control;adaptive fuzzy sliding mode;driving/braking switching
DOI: 10.6043/j.issn.04380479.201808006
针对智能电动汽车(intelligent electric vehicles,IEV)的纵向控制在不确定性干扰下存在非线性、强时变特征,提出一种分层控制架构下的智能电动汽车纵向跟车运动自适应模糊滑模控制方法.根据经典理论力学建立表征智能电动汽车纵向行为机理的动力学系统模型,并进一步构建智能电动汽车纵向跟车运动分层控制构架.上层控制根据本车与前车的行驶状态信息得出期望加速度滑模控制律,进而利用自适应模糊系统替代滑模切换项以改善控制性能; 下层控制通过设计驱动/制动切换策略以提高行驶舒适性,然后基于逆动力学模型实时求解期望控制力矩以跟踪期望加速度.为验证所提方法的有效性,在不同行驶工况下进行的仿真试验结果表明,该方法能实现本车平稳准确地跟随前车行驶,且对前车加速度的干扰具有鲁棒性.
Aiming at that the intelligent electric vehicles (IEV) have nonlinear and strong time-varying characteristics under uncertainty interference,an adaptive fuzzy sliding mode hierarchical control method for longitudinal car-following motion of IEV is proposed.Based on classical theoretical mechanics,a dynamic system model is established to characterize the mechanism of IEV longitudinal behavior.We construct an adaptive hierarchi calcontrol framework in which the upper control layer is designed for obtaining the desired acceleration adaptive sliding mode control law according to the driving state information of the host and preceding vehicles.To improve the control performance,we adopt the fuzzy system to replace the sliding mode switching item to realize adaptive control,effectively overcoming the parameter uncertainty of IEV.In the lower control layer,adrive/brake switch logic is designed to ensure the driving comfort,and the expected torque is solved in real time to track the desired acceleration planned in the upper control layer.For the purpose of verifying the effectiveness of the proposed method,simulation experiments are carried out under different driving conditions.Results show that this method can realize smooth and accurate following of IEV to the preceding vehicle,with robustness toward the interference of the preceding vehicle's acceleration.
随着全球汽车保有量的不断增加,环境污染、能源危机、交通事故等问题日益凸显,促使汽车朝着安全化、节能化、智能化的方向发展.由于新能源汽车具有良好的环保性能并且可以缓解能源短缺,已成为当前的研究热点.新能源汽车主要包括纯电动汽车、混合动力汽车、燃料电池汽车等[13].其中,智能电动汽车(intelligent electric vehicles,IEV)具有安全、环保等特性,在国际上引起了广泛的关注.先进驾驶辅助系统(advanced driver assistance system,ADAS)是智能交通系统(intelligent transport system,ITS)领域的典型应用,其利用车载传感器感知周围环境与车辆运动状态,从而对车辆进行主动控制.ADAS中的自适应巡航控制(adaptive cruise control,ACC)是一种车辆纵向运动辅助驾驶控制系统,能够减轻驾驶员负担的同时可有效提高车辆行驶的安全性.
在车辆纵向运动控制算法方面,国内外学者及研究机构已经做了大量相关研究.Ganji等[4]使用滑模变结构控制方法对混合动力车辆纵向速度进行控制,并将结果与混合粒子群优化比例-微分-积分(proportionintegrationdifferentiation,PID)的控制方法进行对比.Zhu等[5]提出了一种基于模型预测控制的自动地面车辆速度跟踪控制方法,实现高精度速度控制任务.Li等[6]针对最少传感器跟车系统的跟踪误差收敛速度缓慢和对前车干扰鲁棒性差两个主要问题,基于非奇异快速终端滑模理论进行跟车控制,使本车平稳快速跟随前车行驶.马国成等[7]为处理车辆跟随控制中车距与车速误差不易同步收敛的问题,设计线性二次型调节器求解最优期望加速度,并通过仿真和实车试验对控制性能进行验证.Lin等[8]利用自适应神经模糊预测控制,Lou等[9]利用非线性模型预测控制算法均实现了车辆自适应巡航的燃油经济性、乘坐舒适性、可跟踪性等多目标协调控制.然而对纵向运动控制的大量研究主要针对的是传统汽车,而针对电动汽车的较少.电动汽车ACC系统的控制策略、执行机构方面与传统汽车存在较大的差异.
本研究结合IEV纵向跟车运动控制问题,设计了一种分层结构控制器.上层控制器采用自适应模糊滑模控制(adaptive fuzzy sliding mode control,AFSMC)方法决定车辆期望加速度; 下层控制器根据期望加速度选择控制方式,计算出相应执行器期望控制力矩.最后,通过MATLAB/Simulink软件平台进行不同工况下的仿真对所提出的控制算法进行了验证.
根据IEV纵向运动的特点,本研究在建立车辆纵向动力学模型时作3点假设:1)前车和本车都行驶在平直的干燥路面上; 2)忽略车辆横向和垂向运动; 3)车辆左右完全对称,忽略前后轴的载荷转移.首先,根据假设,当不考虑道路坡度时,由经典理论力学原理可得整车纵向力平衡行驶方程为:Fxf+Fxr-Fa-Fr=mv ·x,(1)其中,Fxf和Fxr分别为前、后轮轮胎纵向力,Fa为空气阻力,Fr为滚动阻力,m为车辆质量,vx为车辆纵向速度.忽略风速对Fa的影响,作用在车辆上的Fa可表示为:Fa=ρ CDAv2x/2,(2)其中,ρ为空气密度,CD为空气阻力系数,A为车辆迎风面积.滚动阻力模型采用近似正比于轮胎上法向载荷的模型,其表达式为:Fr=mgf,(3)其中,g为重力加速度,f为滚动阻力系数.其次,对于前轮驱动的电动汽车,其车轮运动动力学方程为{Jwfω ·w=Ts-reffFxf-Tbf ,Jwr ω ·w=-reffFxr-Tbr,(4)其中:Jwf、Jwr分别为前、后车轮转动惯量; ωw为车轮转速; Ts为作用于车轮的驱动力矩,该力矩由电机提供; Tbf、Tbr分别为作用于前后车轮的制动力矩; reff为车轮有效半径.为简化模型,忽略车轮与地面之间的相对滑移,则车辆速度与车轮转速间的关系可以表示:vx=ωwreff.(5)又因车辆在纵向自动跟车行驶时,一般不存在同时驱动和制动的情况[10],故取前、后车轮转动惯量相等,结合式(1)~(5),可将车辆纵向动力学模型表示为Mev ·x=Twheel-(mgf+ρCDAv2x/2)reff,(6)其中:Me=(mr2eff+Jw)r-1eff为等效质量,Jw=Jwf+Jwr; Twheel为作用在车轮上的控制力矩,Twheel为正表示驱动力矩,为负表示制动力矩.
本研究中IEV的驱动力由电机提供.为准确描述车辆的动力学特性,考虑到实际中,电机的力矩输出响应具有一定的延迟,可以将其动态响应描述为一阶惯性环节[11].本研究在建立电机时,不考虑电机效率的约束,将电机实际输出力矩Tm与期望电机力矩Tmdes之间的关系表达为:τmT ·m+Tm=Tmdes,(7)其中,τm为电机一阶惯性环节时间常数.进一步,根据驱动系统输出模型可得电机转递到车轮的力矩Td=η RTm,(8)其中,η为传动效率,R为总传动比.
制动系分为电机制动与液压制动,在前轮需求制动力较小时,使用电机制动,当电机制动力不足时再介入液压制动.电机制动模型可表示为:Tbm={Te, n
忽略电动汽车制动器的非线性特性,考虑制动过程的响应滞后问题,则液压制动系模型可以表示为:τbT·bhTbh=ApRbμbPb.(10)其中:Tbh为液压制动力矩; τb为液压制动系统的一阶制动系惯性环节时间常数; Ap为液压制动活塞面积; Rb为液压制动力有效作用半径; μb为液压制动盘摩擦系数; Pb为液压制动器压力.
当IEV进入ACC行驶模式时,雷达将实时扫描车辆前方的道路信息,如果检测到前方有车辆,本车则自动跟随前车行驶,控制系统将本车与前车的距离控制在一定的安全值.纵向跟车运动场景如图1所示,前车为跟踪目标车辆,取某时刻其位置为xl,本车位置为xf,则两车实际距离s为:s=xl-xf-l,(11)其中,l为前车车身长度.图1中sd为期望跟踪安全车距,在期望车距控制策略中,车间时距模型得到了广泛应用,可分为固定时距控制策略[12](constant time gap,CTG)与可变时距控制策略[13](variable time gap,VTG).控制本车与前车的距离准确跟踪期望车距有利于车辆行驶的安全性以及道路交通利用率的提高.参照文献[12],本文采用CTG作为车距控制策略,其车辆间的期望间距表达式为sd=τhvl+s0,(12)其中:τh为车间时距; vl为前车纵向速度; s0为保证安全的最小距离,取为5 m.
图1 纵向跟车运动示意图
定义本车跟随前车的车距误差为:Δs=s-sd.(13)本车与前车的相对速度表达式为:vre=vl-vf,(14)其中vf为本车纵向速度.设状态变量x=[Δs,vre]T,则车间纵向动力学模型可用二阶状态方程描述为:x ·=Ax+Bu+Φδ,(15)其中:Α=[0 10 0]; B=[0-1]; Φ=[-τh1]; u为系统控制输入,即本车期望加速度ades; δ为前车加速度,视其为系统外部干扰.
Fig.1 Sketch of longitudinal carfollowing motion
IEV纵向运动自动跟车行驶的基本控制原理为根据本车与前车的相对行驶状态信息,按照一定算法协调驱动电机或制动系统传递到车轮的控制力矩,调整本车纵向运动状态,使本车根据期望的距离,安全、平稳地跟随前车行驶.然而,在跟车控制过程中前车加速度具有不确定性,在其干扰下,车辆纵向控制问题具有强时变的特征.
针对上述问题,本研究设计一种IEV纵向跟车运动AFSMC控制方法.建立分层控制结构原理如图2所示,上层由滑模控制器与自适应模糊控制器组成; 下层控制器根据驱动/制动切换策略决定控制方式,由车辆纵向动力学逆模型计算出相应的期望力矩进行协调控制,从而实现加速度期望值的跟踪.图中S为滑模切换函数,f ∧(S)为模糊输出

图2 分层控制器原理图
Fig.2 Schematic diagram of hierarchy controller
上层控制器的目标是计算期望加速度使得系统状态在有限时间内收敛于平衡点.分别取跟车距离误差为Δs,两车相对速度为vre,定义S表达式为:S=cΔs+vre,(16)其中c为大于零的实数.从而滑模函数的变化率为:S ·=c(s ·-s ·d)+(v ·l-v ·x).(17)为使系统得到快速的响应,采用指数趋近律,即:S ·=-kS-εsgn S.(18)其中k和ε均为大于0的常数.结合式(15)、(17)和(18),期望加速度滑模控制律可设计为:u=cvre-(cτh-1)v ·l+kS+εsgn S.(19)
参数摄动及外部干扰具有鲁棒性,得到了广泛的应用,但是在滑动面附近会出现高频抖振现象[14].此外,滑模变结构控制的切换控制增益采用固定值,这会导致系统在较大的范围内运行时无法得到良好的控制性能.由于模糊系统具有万能逼近特性,能够有效地利用模糊语言的能力.为减小抖振和提高控制器性能,本研究结合滑模控制与模糊控制的优点,对控制器进行优化.利用自适应模糊控制方法,以自适应模糊系统的输出f ∧(S)逼近滑模控制器中的切换控制项εsgn S,使切换项连续化.故由式(19),期望加速度控制律可以改写为:u=cvre-(cτh-1)v ·l+kS+f ∧(S).(20)选择滑模切换函数S作为模糊控制器的输入变量,选择5个模糊语言变量对输入、输出变量模糊化,即{NB,NM,ZO,PM,PB},分别表示{负大,负中,零,正中,正大}; 采用ifthen语句描述模糊系统规则:Rj:if S is Aj, then f ∧(S) is Bj.其中:Rj为第j个模糊规则,j=1,2,…,5是模糊规则数; Aj、Bj分别为论域内定义的输入、输出模糊语言值.模糊推理采用Mandani方法,去模糊化采用重心法,则模糊输出可表示为:f ∧(S)=∑5i=1μi(S)fi(∑5i=1μi(S))-1=θ ∧f(S),(21)
其中:μi 为S 的隶属函数;θ∧f = [f1,f2,…,f5]为调节参数矢量,f1 ~f5 为f∧(S)的隶属函数中心;ξ(S)=[ξ1(S),ξ2(S),…,ξ5 (S)]T 为模糊基向量,且ξi(S)=μi(S)(Σ5j=1μj(S))-1. (22)
定义最优参数为:θ* f =arg min θf ∈Wθ[sup S∈WS|f∧(S|θ∧f)-εsgnS|],(23)
其中:Wθ,WS 分别为θf 和S 的集合.假设存在一个滑模条件f(S),其表达式为:f(S)=θ* fξ(S). (24)
定义最小逼近误差为:f∧(S)-f(S)=θ~fξ(S)=?, (25)
其中,?为很小的正数,θ~f =θ∧f -θ* f 为参数矢量误差.
定义Lyapunov函数为:V =S2/2+θ~fθ~fT(2γ)-1, (26)
其中γ>0.则其导数为:V ·=S(-f∧(S)-kS)+θ~fθ∧·fT/γ=S(-θ~fξ(S)-θ* fξ(S)-kS)+θ~fθ∧·fT/γ=S(-θ* fξ(S)-kS)+θ~f(θ∧·fT/γ-Sξ(S)), (27)
取自适应律为:θ∧·Tf=γSξ(S), (28)
由θ* fξ(S)=εsgnS 可得:V ·=-kS2 -ε|S|≤0. (29)
当V · ≡0时S ≡0,根据LaSalle不变集原理,t→∞ 时S → 0.由上述分析可见,系统是渐进稳定的.
下层力矩控制器的控制目标为实现对上层期望加速度的跟踪.控制器根据上层控制器输出的期望加速度调整速度时,首先需选择驱动或制动控制的决策,而驱动与制动的判定需要建立切换标准[15].为使
IEV 在行驶过程中不出现驱动力矩和控制力矩同时存在的情况,以及考虑到车辆的行驶舒适性,制定包含缓冲层的切换策略.
当电动汽车的电机和制动系统不输出控制力矩,即Twheel =0时,根据式(6)可得车辆临界加速度ac =- (mgf +12ρCDAv2x)reffM-e1. (30)
因此,当期望加速度ades 大于当前速度下的临界加速度ac 时可采用驱动控制,当ades 小于ac 时可采用制动控制.但是,当期望加速度在此曲线附近浮动时,采用这种控制方法会导致电动汽车在驱动与制动控制之间频繁切换,从而影响电动汽车动力系统的寿命和纵向行驶舒适性.因此,本研究制定切换策略时引入一个小的缓冲层Δh,其可以描述为:
ades >ac+Δh,驱动控制;ades < ac-Δh,制动控制;ac-Δh ≤ades ≤ac+Δh,不驱动也不制动.
其中:缓冲层的大小可根据电动汽车响应进行调节,本研究取Δh =0.05m/s2.
下层控制器基于期望加速度得到控制方式指令后,根据车辆逆纵向动力学模型计算相应的驱动或制动力矩对车辆进行控制.若为驱动控制,则可求得期望车轮驱动力矩为:
Tt_des =Meades+ mgf+ρCDAv2x/2 reff. (31)
结合式(7)~(8)可计算出期望电机输出驱动力矩为:
Tm_des = (τmT ·t_des+Tt_des)/ηR. (32)
若为制动控制,可求得期望制动力矩表达式为:
Tb_des=-Meades- mgf+ρCDAv2x/2 reff, (33)
同理,根据式(33)期望制动力矩可由式(9)或(10)推算出期望电机制动力矩或液压制动器压力.
为验证本研究针对IEV 纵向运动控制所提出算法的有效性以及对不同道路的适应能力,在MATLAB/Simulink环境下分别进行道路阻尼系数f 为0.015和0.04两种工况的仿真试验,仿真电动车辆的参数如表1所示.同时,将本研究所提出的自适应模糊滑模控制方法与滑模变结构控制(SMC)以及文献[16]提出的最优PD控制方法进行对比.
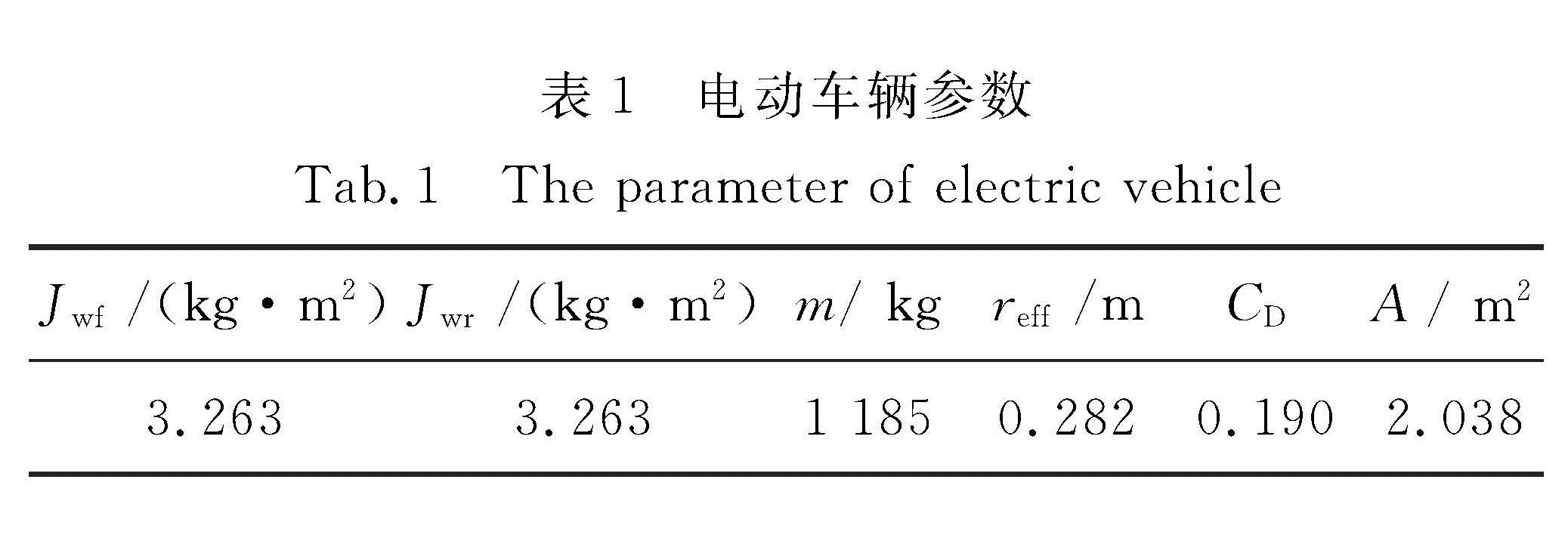
表1 电动车辆参数
Tab.1 Theparameterofelectricvehicle
仿真工况Ⅰ将道路阻尼系数f 设为0.015,设置前车加速度工况如图3所示.仿真时间为60s,初始加速度为零,从第10s开始以1 m/s2 的加速度加速15s;第35s开始以0.8m/s2的减速度行驶到第50s后匀速行驶.取本车与前车的初始距离偏差和速度偏差均为0,本车初始速度为10m/s.同时,将AFSMC与SMC进行仿真对比研究,仿真结果如图4和5所示.
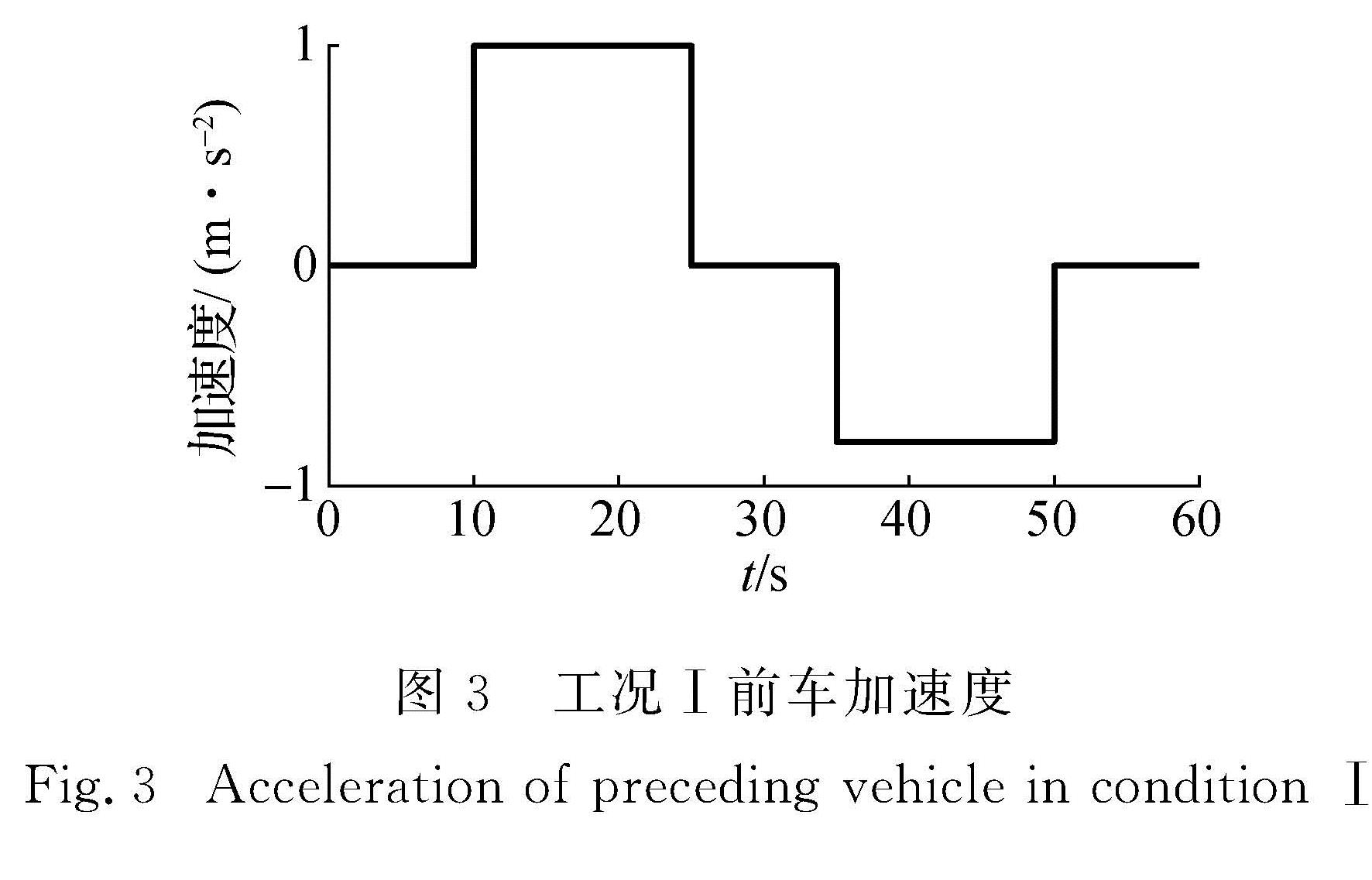
图3 工况Ⅰ前车加速度
Fig.3 AccelerationofprecedingvehicleinconditionⅠ
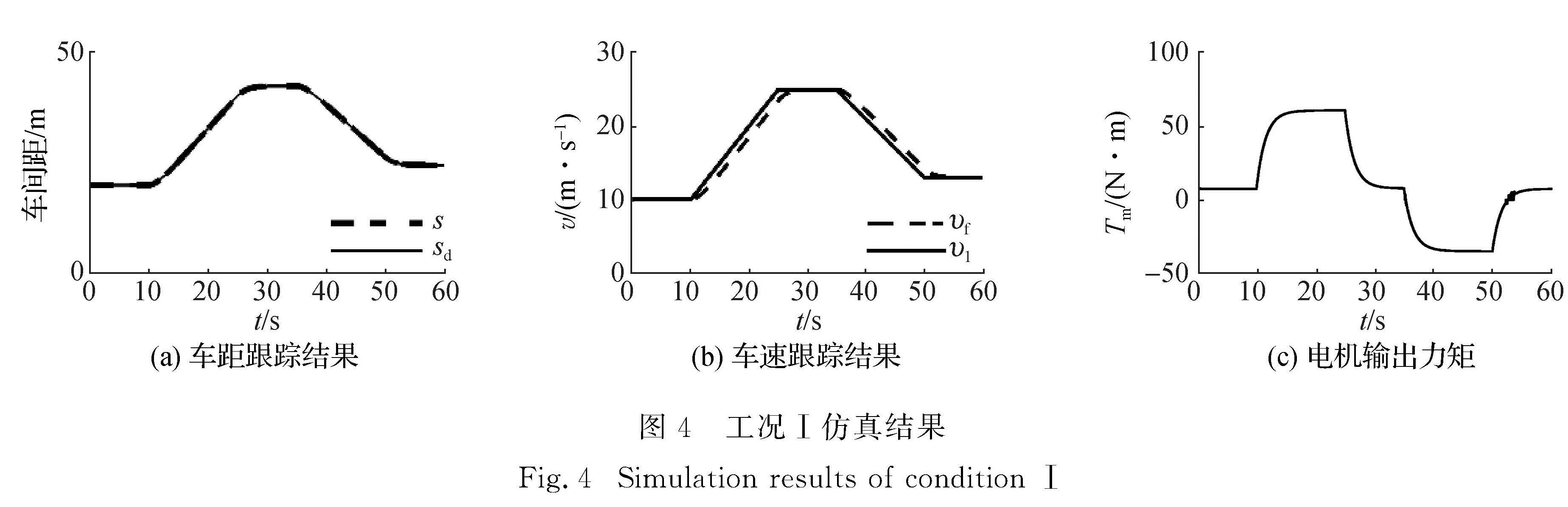
图4 工况Ⅰ仿真结果
Fig.4 SimulationresultsofconditionⅠ
图5(a)~(c)为本研究提出的AFSMC控制算法与SMC算法的对比仿真结果.图5(a)实线为AFSMC控制跟车行驶的距离偏差结果,其值在很小的范围内;图中虚线为SMC控制结果,可以看出25s附近出现了较大的超调量,过程存在抖振,对比结果表明AFSMC对车距控制具有较好的控制效果;图5(b)显示2种算法对速度的控制偏差,图中局部放大图表明,在20s到25s附近SMC控制的结果出现了较大的偏差;图5(c)为本车加速度af,图中点线、虚线分别表示SMC 和AFSMC 控制作用下的车辆加速度结果,SMC控制过程出现了很大的抖振,而AFSMC控
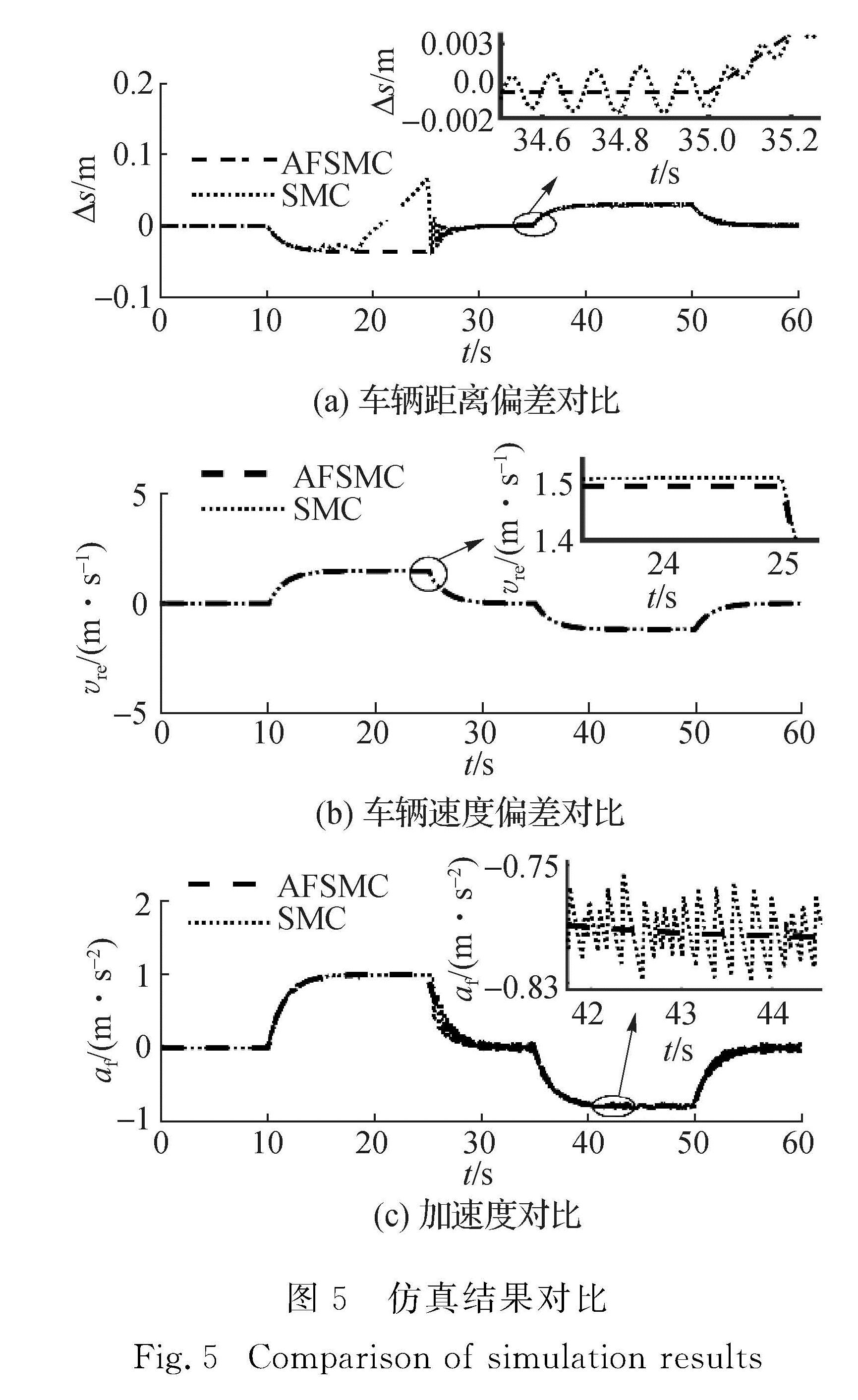
图5 仿真结果对比
Fig.5 Comparisonofsimulationresults
如图6所示,仿真工况Ⅱ设置前车加速度呈正弦规律变化,正弦周期为30s,道路阻尼系数f 设为0.04,其他初始条件值与仿真工况Ⅰ相同.仿真结果与最优PD控制器进行对比,结果如图7所示.

图6 工况Ⅱ前车加速度
Fig.6 AccelerationofprecedingvehicleinconditionⅡ

图7 工况Ⅱ仿真结果
Fig.7 SimulationresultsofconditionⅡ
本研究针对IEV 纵向自动跟车控制的非线性、强时变问题,设计了分层结构控制器,提出期望加速度滑模控制率,使用自适应模糊控制方法实现了滑模切换项连续化,控制性能得到了优化.不同工况下的对比仿真结果表明:
1)在自适应模糊滑模方法的控制下,IEV 对不同的道路条件具有较强的适应性,且对不同前车加速度的干扰具有鲁棒性;
2)本研究所提出的AFSMC算法具有较高的控制精度,可使本车与前车的距离快速准确跟踪期望车距,实现车辆行驶的安全性能;
3)自适应模糊滑模控制消除了滑模控制的抖振现象,可提高IEV 纵向自动跟车行驶时的舒适性.