(School of Aerospace Engineering,Xiamen University,Xiamen 361102,China)
large ship; berthing; tugboats formation control; disturbance observers; interconnected systems
备注
为了研究多艘拖轮协助欠驱动大型船舶靠泊的控制,提出了一种采用拖轮编队来解决大型船舶靠泊问题的控制方法.在拖轮的水动力学模型中,将大型船舶对拖轮的反作用力视为未知输入,给出了一种干扰估计误差方程和原状态方程形成互联系统的干扰观测器.该干扰观测器使得拖轮速度实际值与期望值误差能够快速收敛.在干扰观测器的基础上给出了拖轮编队控制器设计,并分析了闭环系统的稳定性.仿真结果验证了该方法的有效性.
This paper addresses the control for multiple tugboats assisting the under-actuated large ship berthing.The control method is proposed for the large ship berthing by using tugboats formation.In the tugboats hydrodynamics model,reaction forces produced by the large ship are seen as the unknown input.The disturbance observers are given such that interconnected systems composed by disturbance-estimated error equations and original state equations are produced.These disturbance observers can accelerate the convergence of tugboats actual velocities and expected velocities.Then,based on them,the design of the tugboats formation controllers is given,and the stability of the closed-loop systems is analyzed.The simulation result shows that the method is effective.
引言
编队控制在航天、航海、机器人等领域有着广泛的应用前景,成为近年来的研究热点[1].在航海领域,船舶编队控制的研究大多集中于编队在大洋中航行时的控制问题[2-9].相对于船舶在大洋中的航行,因港口水域受限及地理条件的复杂性,船舶的靠泊操纵具有一定的复杂性和困难性.船舶的靠泊控制研究从20世纪90年代起受到关注,现已有较多文献报道应用各种控制算法使船舶依靠浆、舵、侧推器等自身动力实现靠泊[10-15].
大型船舶在靠泊过程中,为了安全需在低航速下行驶.但大型船舶在低航速下,易失去舵效,缺少侧推器的情况下一般需要多艘拖轮协助其靠泊.目前多艘拖轮协助大型船舶靠泊控制的研究大多数是以大型船舶为核心,在已知或估计大型船舶水动力学模型的基础上计算大型船舶靠泊所需的力和力矩,再通过一定的算法将控制力和力矩分配到多艘拖轮中,并未考虑拖轮的运动控制[16-20].
拖轮与大型船舶之间的连接并不是固定的,一旦拖轮与大型船舶脱离,其控制输入将变化为零,需重新进行控制分配.拖轮的控制输入应为自身运动需要的和所分配的控制量相叠加.现有多艘拖轮的协调多由引航员人工处理,但当拖轮数量较多时,人工协调存在困难.因此,研究拖轮编队控制具有一定的实际意义.已有干扰观测器的研究表明其能够很好地估计慢变的外扰和系统的不确定性[21].目前,基于干扰观测器的补偿控制方法所用的闭环系统是干扰实际值与估计值的误差方程同原状态方程之间没有耦合相级联的系统,即级联系统.但耦合并不都是有害的,而是可以利用的.文献[22-23]中利用耦合实现了一类闭环系统的镇定控制.
本研究以拖轮为研究对象,多艘拖轮组成队形为虚拟刚性结构的编队,通过控制拖轮编队的运动来带动大型船舶的运动.将大型船舶靠泊轨迹规划为两个步骤,并应用贝塞尔曲线将大型船舶靠泊过程规划成两个步骤.使用leader-follower的方法,将已规划好路径和速度的虚拟船作为领航船,拖轮作为跟随船,进而将靠泊控制问题转化为拖轮编队的控制问题.在拖轮的水动力学模型中,将大型船舶靠泊所需的力和力矩视为每艘拖轮的未知输入.受文献[22-23]的启发,本研究给出了一种干扰估计误差方程和原始状态方程形成互联系统的干扰观测器,将闭环系统看成拖轮和大型船舶相互耦合的系统.基于此干扰观测器的补偿控制能使得拖轮速度实际值与期望值误差快速收敛.然后对闭环系统进行了稳定性分析.
1 问题描述与靠泊规划
记{O}表示惯性坐标系.不失一般性,设坐标系{O}的横轴与泊位平行,泊位的中心位置在坐标系{O}中的坐标为(xd0,yd0),大型船舶船体中心需停靠在该位置,航向角为0.5π.大型船舶靠泊轨迹的规划如图1所示.首先大型船舶在拖轮的协助下航行至泊位前方(xd1,yd0)处并停止; 然后在拖轮的推动下移动至泊位,即将大型船舶靠泊过程分成运动轨迹1和运动轨迹2两个过程.
在运动轨迹1中,对大型船舶的期望航行轨迹进行规划,采用5个坐标控制点确定的四阶贝塞尔曲线来表示轨迹,表达式为[24]:
图1 大型船舶靠泊过程的规划
Fig.1 Planning of the large ship berthing path{xp=∑4l=0C4lλl1(1-λ1)4-lxp l,
yp=∑4l=0C4lλl1(1-λ1)4-lyp l,(1)
其中,C4l=(4!)/(l!(4-l)!),λ01=1,(xp l,yp l)为坐标系{O}中的5个坐标点,λ1=λ1(t)∈[0,1].
在运动轨迹2中,大型船舶的期望航行轨迹是直线,采用二阶贝塞尔曲线表示:
{xq=∑2l=0C2lλl2(1-λ2)2-lxq l,
yq=yd0,(2)
其中,C2l=(2!)/(l!(2-l)!),λ02=1,(xq l,yd0)为坐标系{O}中的3个坐标点,λ2=λ2(t)∈[0,1].
令
{λ1=1-cos(0.5π(1-ek1t)),
λ2=1-cos(0.5π(1-ek2(t-t1))),
其中,k1<0和k2<0为可调参数,t1为运动过程1切换到运动过程2的时刻.
由贝塞尔曲线的性质可知,运动过程1的起始点是(xp0,yp0),终点是(xp4,yp4),选择坐标控制点(xp4,yp4)=(xd1,yd0).同理,运动过程2选择坐标控制点xq0=xd1,xq2=xd0.
设一虚拟船从(xp0,yp0)出发并沿曲线式(1)和(2)运动,则当t→∞时,虚拟船停在(xd0,yd0)处.那么,运动过程1中虚拟船的航向Ψ ~0、纵向速度u ~0、横荡速度v ~0和艏摇角速度r ~0为
{Ψ ~0=arctan((y ·p)/(x ·p)),
u ~0=(x ·2p+y ·2p)1/2,
v ~0=0,
r ~0=(x ·py ··p-x ··py ·p)/(x ·2p+y ·2p).(3)
其中x ·p、y ·p与x ··p、y ··p为xp、yp对时间的一阶与二阶微分.由式(3),为了使得虚拟船在(xd1,yd0)处的航向Ψ ~0为0.5π,应取xp3=xd1,yp3<yd0.
同理可得,运动过程2中虚拟船的航向Ψ ~0、纵向速度u ~0、横荡速度v ~0和艏摇角速度r ~0为
{Ψ ~0=0.5π,
u ~0=0,
v ~0=-x ·q,
r ~0=0.(4)
其中x ·q为xq对时间的一阶微分.
引入虚拟船后,若大型船舶在拖轮的协助下能够跟踪虚拟船的运动,则大型船舶最终能停止在(xd0,yd0)处且航向角在0.5π处.
将协助大型船舶靠泊的多艘拖轮视为拖轮编队.拖轮编队的运动过程如图2所示.在运动过程1中,在大型船舶船舷两侧用2~6艘拖轮采用顶推或吊拖方式控制大型船舶的艏摇角速度和横荡速度,位于船艉采用1艘拖轮使用吊拖方式协助控制大型船舶的纵向速度.在运动过程2中,撤除岸边一侧的拖轮.设拖轮已经聚集在大型船舶周围,拖轮编队的队形为虚拟刚性结构.拖轮编队运动时,相当于一虚拟刚体携带大型船舶在运动,从而实现大型船舶的靠泊.
记{B0}和{Bi}分别表示大型船舶的船体坐标系和拖轮i的船体坐标系(i=1,2,…,n).(x0/i,y0/i)表示大型船舶船体中心在坐标系{Bi}中的坐标,(x0,y0)和(xi,yi)分别表示大型船舶船体中心和拖轮i船体中心在坐标系{O}中的坐标.Ψi表示拖轮i与坐标系{O}纵轴偏差角度即航向,ui、vi和ri分别表示在坐标系[O]中拖轮i船体中心的纵向速度、横荡速度和艏摇角速度,Ψ0表示在坐标系[O]中大型船舶的航向,u0、v0和r0分别表示在坐标系[O]中大型船舶船体中心的纵向速度、横荡速度和艏摇角速度.拖轮i与大型船舶的运动示意图如图3所示.
图2 拖轮编队的运动过程
Fig.2 Motion of the tugboats formation由图3,拖轮i与大型船舶位置偏差和航向偏差的运动学模型为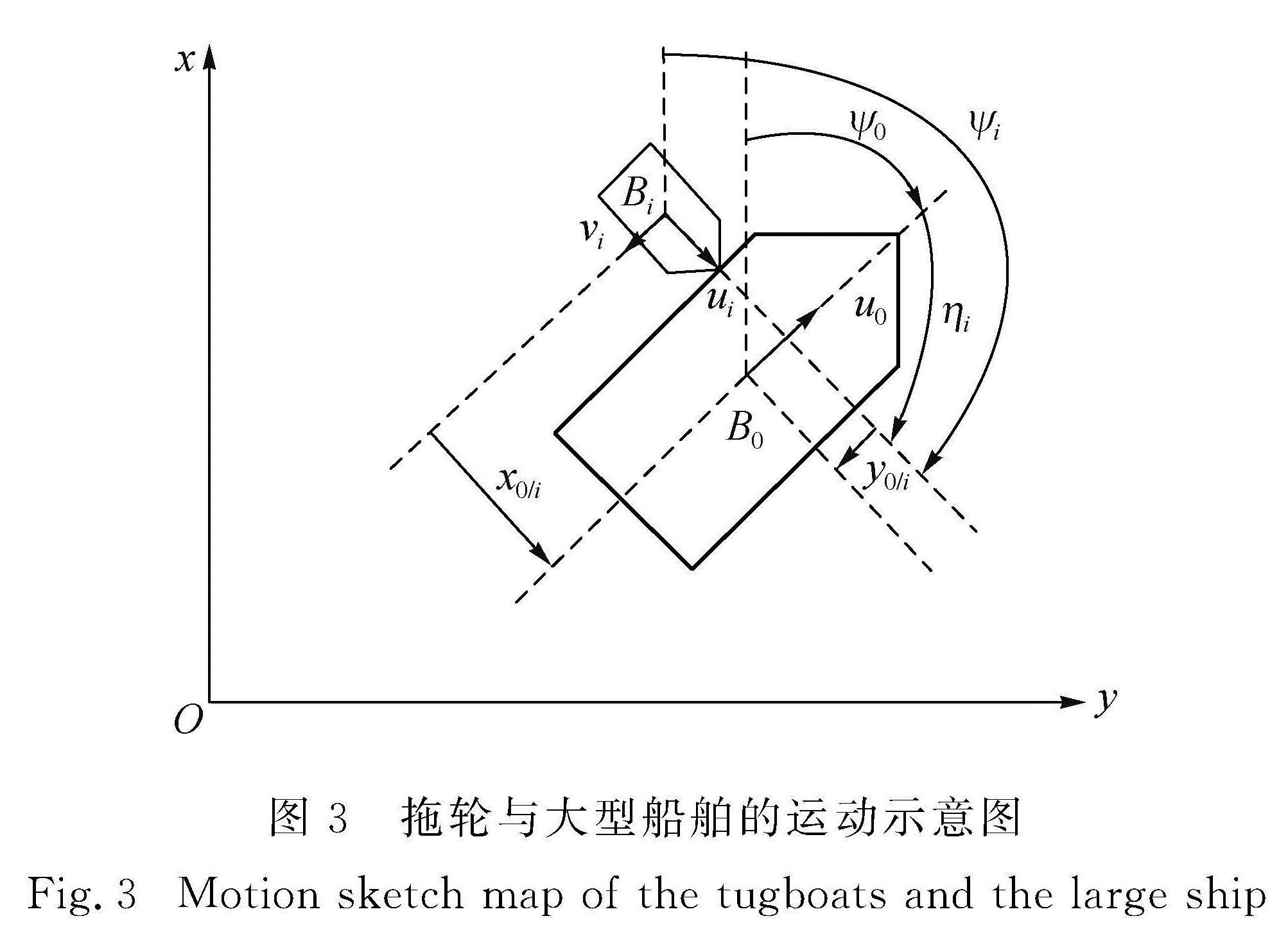
图3 拖轮与大型船舶的运动示意图
Fig.3 Motion sketch map of the tugboats and the large ship{x ·0/i=-ui+u0cos ηi-v0sin ηi+riy0/i,
y ·0/i=-vi+u0sin ηi+v0cos ηi-rix0/i,
η ·i=r0-ri,(5)
其中,ηi=Ψ0-Ψi.
将虚拟船作为领航船,拖轮作为跟随船.同式(5),拖轮i与虚拟领航船位置偏差和航向偏差的运动学模型为
{x ~·0/i=-ui+u ~0cos η ~i-v ~0sin η ~i+riy~0/i,
y~·0/i=-vi+u ~0sin η ~i+v ~0cos η ~i-rix ~0/i,
η ~·i=r ~0-ri,(6)
其中,(x ~0/i,y~0/i)表示虚拟领航船在坐标系{Bi}中的坐标,η ~i=Ψ ~0-Ψi.
在靠泊过程中,将大型船舶对拖轮i的反作用力X0i、Y0i和N0i视为未知,作为拖轮i的输入.拖轮i在纵向、横荡和艏摇3个自由度的水动力学模型为[25]
{(mi-Xu ·i)u ·i=
miviri+mixG ir2</sub><sub>i+XHi+X0i+Xw i+Xτi,
(mi-Yv ·i)v ·i+(mixG i-Yr ·i)r ·i=
-miuiri+YHi+Y0i+Yw i+Yτi,
(mixG i-Yr ·i)v ·i+(Izi-Nr ·i)r ·i=
-mixG iuiri+NHi+N0i+Nw i+Nτi,(7)
其中,XHi、YHi和NHi为拖轮i的黏性水动力和力矩,Izi为拖轮i的惯性矩,Xu ·i、Yv ·i、Yr ·i和Nr ·i为拖轮i的附加质量和附加惯性矩,Xw i、Yw i和Nw i为风、浪、流对拖轮i所产生的外扰,(xG i,0)为拖轮i船体重心在坐标系{Bi}中的坐标点.
设拖轮i与虚拟领航船的期望距离偏差和航向偏差(xdi,ydi,ηdi)为常数,速度uτi、vτi和rτi为拖轮i的运动学虚拟控制输入.令拖轮i纵向速度、横荡速度和艏摇角速度与虚拟控制输入的误差分别为uei=ui-uτi,vei=vi-vτi,rei=ri-rτi,拖轮i与虚拟领航船纵向、横向距离偏差和航向偏差与期望值误差分别为xei=x ~0/i-xdi,yei=y~0/i-ydi,ηei=η ~i-ηdi.则误差满足方程:
{x ·ei=-uτi-uei+u ~0cos η ~i-v ~0sin η ~i+
ri(yei+ydi),
y ·ei=-vτi-vei+u ~0sin η ~i+v ~0cos η ~i-
ri(xei+xdi),
η ·ei=r ~0-rτi-rei,(8)
{(mi-Xu ·i)u ·ei=Xi+XΔi+Xτi-(mi-Xu ·i)u ·τi,
(mi-Yv ·i)v ·ei+(mixG i-Yr ·i)r ·ei=Yi+YΔi+Yτi-
(mi-Yv ·i)v ·τi-(mixG i-Yr ·i)r ·τi,
(mixGi-Yr ·i)v ·ei+(Izi-Nr ·i)r ·ei=Ni+NΔi+
Nτi-(mixG i-Yr ·i)v ·τi-(Izi-Nr ·i)r ·τi,(9)
其中,XΔi=X0i+Xwi,YΔi=Y0i+Ywi,NΔi=N0i+Nwi,Xi=miviri+mixGir2<sup>i+XHi,Yi=-miuiri+YHi,Ni=-mixGiuiri+NHi.
综上所述,若系统(8),(9)最终一致有界,则拖轮编队组成虚拟刚性结构队形并带动大型船舶运动,从而实现大型船舶停靠在泊位邻近处.因此,本文中解决拖轮编队协助大型船舶靠泊控制问题转化为系统(8),(9)的镇定控制问题.
2 基于拖轮编队的大型船舶靠泊控制
设矩阵A=(aij)∈Rn×n,A -=(a -ij)∈Rn×n,A ~=(a ~ij)∈Rn×n为拖轮编队的加权邻接矩阵.加权邻接矩阵中aii=0,a -ii=0,a ~ii=0.若拖轮j为拖轮i的邻居,则
aij>0,a -ij>0,a ~ij>0,
否则
aij=0,a -ij=0,a ~ij=0.
令拖轮i运动学虚拟控制输入为
{uτi=u ~0cos η ~i-v ~0sin η ~i+riydi+kuixei+
∑j∈Πiaij(xei-xej),
vτi=u ~0sin η ~i+v ~0cos η ~i-rixdi+kv iyei+
∑j∈Πia -ij(yei-yej),
rτi=r ~0+kriηei+∑j∈Πia ~ij(ηei-ηej),(10)
其中,Πi{1,2,…i-1,i+1,…,n}为拖轮i的周围邻居拖轮集合,kui>0、kvi>0和kri>0为可调参数.
令
{X'τi=-Xi+(mi-Xu ·i)u ·τi+X″τi,
Y'τi=-Yi+(mi-Yv ·i)v ·τi+
(mixGi-Yr ·i)r ·τi+Y″τi,
N'τi=-Ni+(mixGi-Yr ·i)v ·τi+
(Izi-Nr ·i)r ·τi+N″τi,(11)
{X″τi=-kXi(mi-Xu ·i)sign(uei)|uei|αXi,
Y″τi=-kYi(mi-Yv ·i)sign(vei)|vei|αYi,
N″τi=-kNi(Izi-Nr ·i)sign(rei)|rei|αNi,
其中,kXi>0,kYi>0,kNi>0,0<αXi<1,0<αYi<1和0<αNi<1为可调参数.
取干扰观测器为
{ξ ·Xi=-βXiX″τi+βiuei,
ξ ·Yi=-βYiY″τi+βivei,
ξ ·Ni=-βNiN″τi+βirei,
{X ∧Δi=ξXi+βXi(mi-Xu ·i)uei,
Y ∧Δi=ξYi+βYi((mi-Yv ·i)vei+(mixGi-Yr ·i)rei),
N ∧Δi=ξNi+βNi((mixGi-Yr ·i)vei+(Izi-Nr ·i)rei),(12)
其中,βXi>0,βYi>0,βNi>0和βi>0为可调参数.
记干扰实际值与估计值误差为XΔei=XΔi-X ∧Δi、YΔei=YΔi-Y ∧Δi和NΔei=NΔi-N ∧Δi,则误差满足方程:
{X ·Δei=-βXiXΔei-βiuei+X ·Δi,
Y ·Δei=-βYiYΔei-βivei+Y ·Δi,
N ·Δei=-βNiNΔei-βirei+N ·Δi.(13)
由式(11)和(12),则拖轮i水动力学控制器为
{Xτi=X'τi-X ∧Δi,
Yτi=Y'τi-Y ∧Δi,
Nτi=N'τi-N ∧Δi.(14)
记矩阵Ku、Kv、Kr和Mi分别为
Ku=A-diag{ku1+∑j∈Π1a1j,…,ku n+∑j∈Πnanj},
Kv=A --diag{kv1+∑j∈Π1a -1j,…,kv n+∑j∈Πna -nj},
Kr=A ~-diag{kr1+∑j∈Π1a ~1j,…,kr n+∑j∈Πna ~nj},
Mi=[mi-Xu ·i 0 0
0 mi-Yv ·i mixGi-Yr ·i
0 mixGi-Yr ·i Izi-Nr ·i].
若拖轮i运动学虚拟控制输入、干扰观测器和水动力学控制器分别取式(10)、(12)和(14),则系统(8)~(9)和干扰估计误差系统(13)构成的闭环系统为
z ·=Kz+Hυ,(15)
Mυ·=ksgn(υ)+ζ,(16)
ζ·=B1ζ+B2υ+ζΔ,(17)
其中,向量z=[xe1,…,xen,ye1,…,yen,ηe1,…,ηen]T,向量υ=[ue1,ve1,re1,…,uen,ven,ren]T,向量ζ=[XΔe1,YΔe1,NΔe1,…,XΔen,YΔen,NΔen]T,向量ζΔ=[X ·Δ1,Y ·Δ1,N ·Δ1,…,X ·Δn,Y ·Δn,N ·Δn]T,矩阵K=diag{Ku,Kv,Kr},矩阵H满足[ue1,…,uen,ve1,…,ven,re1,…,ren]T=Hυ,矩阵M=diag{M1,…,Mn},向量ksgn(υ)=[X″τ1,Y″τ1,N″τ1,…,X″τn,Y″τn,N″τn]T,矩阵B1=-diag{βX1,βY1,βN1,…,βXn,βYn,βNn},矩阵B2=-diag{β1,β1,β1,…,βn,βn,βn}.
对闭环系统(10)进行稳定性分析,得到本研究的主要结果:
定理1 若拖轮i运动学虚拟控制输入、干扰观测器和水动力学控制器分别取式(10)、(12)和(14),则闭环系统(15)~(17)最终一致有界.
证明 由文献[25]可知,Mi为对称正定矩阵,则M也为对称正定矩阵.
对于子系统(16)和(17),取Lyapunov函数为V1=-υTB2Mυ+ζTζ,则
V ·1=-2υTB2ksgn(υ)-2υTB2ζ+2ζTB1ζ+2ζTB2υ+2ζTζΔ≤-2υTB2ksgn(υ)+2ζTB1ζ+2ζTζΔ.
显然,由于ζΔ有界,则存在正常数ε1,当‖υ‖>ε1时,V ·1<0.即存在初始时刻t0≥0及与t0无关的时刻T1≥0,当t≥t0+T1时,‖υ‖≤ε1.由此可得,子系统(16)和(17)最终一致有界.
由于矩阵K每个对角元素绝对值大于所在行的非对角元素绝对值之和,则K为严格行对角占优矩阵.根据Gerschgorin圆盘定理,且矩阵K每个对角元素为负实数,容易得到矩阵K所有特征根具有负实部.从而存在对称正定矩阵P满足
KTP+PK<0.
进一步,对于子系统(15),取Lyapunov函数为V2=zTPz,则
V ·2=zT(KTP+PK)z+zTHυ+υTHTz=
zT(KTP+PK)z+2zTHυ.
当t≥t0+T1时,
V ·2≤zT(KTP+PK)z+2‖z‖‖υ‖≤
zT(KTP+PK)z+2ε1‖z‖.
同理可得,存在正常数ε2,初始时刻t0≥0及与t0无关的时刻T2≥0,当t≥t0+T1+T2时,‖z‖≤ε2.由此可得,子系统(15)最终一致有界.
综上所述,闭环系统(15)~(17)最终一致有界.由此定理得证.
注1 式(12)和文献[21]中的干扰观测器结构有差异,这里引入了βiuei、βivei和βirei的反馈,使得系统(8)和(9)和干扰估计误差系统(13)组成的系统是互联系统而不是级联系统.由定理1的证明可知,若βi取高增益系数,则减小了uei、vei和rei的最终边界值,且uei、vei和rei能够快速收敛.此外,提高参数βXi、βYi、βNi、kui、kvi和kri的增益也能够减小闭环系统(15)~(17)的最终边界.
3 仿 真
对5艘拖轮协助大型船舶靠泊进行仿真.大型船舶两柱间长为304 m,船宽为52.5 m.所有拖轮两柱间长为29 m,船宽为9.8 m,方形系数为0.566.设大型船舶在坐标系{O}的位置初值均为(0,0,0),速度(u0,v0,r0)初值为(2,0,0),停泊位置的坐标(xd0,yd0)为(1 000,2 000),泊位前方坐标(xd1,yd0)为(900,2 000).
贝塞尔曲线式(1)中的5个坐标控制点取(xp0,yp0)=(0,0),(xp1,yp1)=(900,0),(xp2,yp2)=(900,100),(xp3,yp3)=(900,1 800),(xp4,yp4)=(900,2 000).贝塞尔曲线式(2)中的3个坐标控制点取(xq0,yq0)=(xq1,yq1)=(900,2 000),(xq2,yq2)=(1 000,2 000).取λ1=1-cos(0.5π(1-e-0.004t)).当t>1 400时,λ1≈1,大型船舶进入运动过程2.取t1=1 400,λ2=1-cos(0.5π(1-e-0.01(t-1 400))).
在运动过程1中,拖轮1和2分别位于大型船舶船舷右侧的艏部和艉部,使用顶推方式; 拖轮3和4位于大型船舶船舷左侧的艏部,使用顶推方式; 拖轮5位于大型船舶的船艉处,使用吊拖方式.在坐标系{Bi}中,虚拟领航船与所有拖轮的距离航向偏差期望值分别为(40.75,-130,0.5π)、(40.75,130,0.5π)、(40.75,130,-0.5π)、(40.75,-130,-0.5π)和(-180,0,π).在运动过程2中,撤除大型船舶船舷左侧的拖轮,只保留船舷右侧和船艉处的拖轮.
在运动过程1中,取拖轮编队的加权邻接矩阵为
A=[0 2 0 1 1
2 0 1 1 0
0 1 0 2 1
2 0 1 0 1
2 2 0 0 0],
A -=[0 1 0 0.5 0.5
1 0 0.5 0.5 0
0 0.5 0 1 0.5
1 0 0.5 0 0.5
1 1 0 0 0],
A ~=[0 0.5 0 0.25 0.25
0.5 0 0.25 0.25 0
0 0.25 0 0.5 0.25
0.5 0 0.25 0 0.25
0.5 0.5 0 0 0].
在运动过程2中,只有拖轮1,2和5参与拖轮编队,取拖轮编队的加权邻接矩阵为
A=[0 2 1
2 0 0
2 2 0],A -=[0 1 0.5
1 0 0
1 1 0],
A ~=[0 0.5 0.25
0.5 0 0
0.5 0.5 0].
当大型船舶与拖轮接触在一起时,其相互作用力相对于两船的间距变化很快.对于这类刚性问题,数值仿真时间过长.为简化仿真,将大型船舶靠泊过程所需的控制力和力矩设为
Xτ0=-XH0-4.198 1×108v0r0-
2.420 5×108(u0-u ~0-u ~·0),
Yτ0=-YH0-2.420 5×108u0r0-
(4.198 1×108(v0-v ~0-v ~·0)-
8.321 4×109(r0-r ~0-r ~·0)),
Nτ0=-NH0-(2.985 0×109(v0-v ~0-v ~·0)-
1.959 7×1012(r0-r ~0-r ~·0)),
其中,XH0、YH0和NH0的表达式见文献[10].
所有拖轮已经聚集在大型船舶周围,使用吊拖方式的拖轮已完成和大型船舶的系缆,即位置误差(xei,yei,ηei)初值均为(0,0,0),速度(ui,vi,ri)初值分别为(0,2,0)、(0,2,0)、(0,-2,0)、(0,-2,0)和(-2,0,0),(ξXi,ξYi,ξNi)初值均为(0,0,0).
所有拖轮运动学虚拟控制输入(10)中的参数均为kui=5,kvi=2,kri=1.式(11)中的参数均为kXi=kYi=kNi=4,αXi=αYi=αNi=0.5.
干扰观测器(12)中的参数均为βXi=βYi=βNi=3,βi=5×106.风、浪、流对所有拖轮的纵向干扰力、横向干扰力和艏摇干扰力矩分别为Xwi=5×105sin(0.05t)、Ywi=5×105sin(0.06t)和Nwi=5×105sin(0.04t).假设大型船舶对所有拖轮只在纵向有反作用力,仿真结果如图4所示.

图4 大型船舶的靠泊运动过程
Fig.4 Motion of the large ship berthing从图4和5可看出大型船舶能够靠泊在相应的泊位上,拖轮编队队形保持虚拟刚性结构.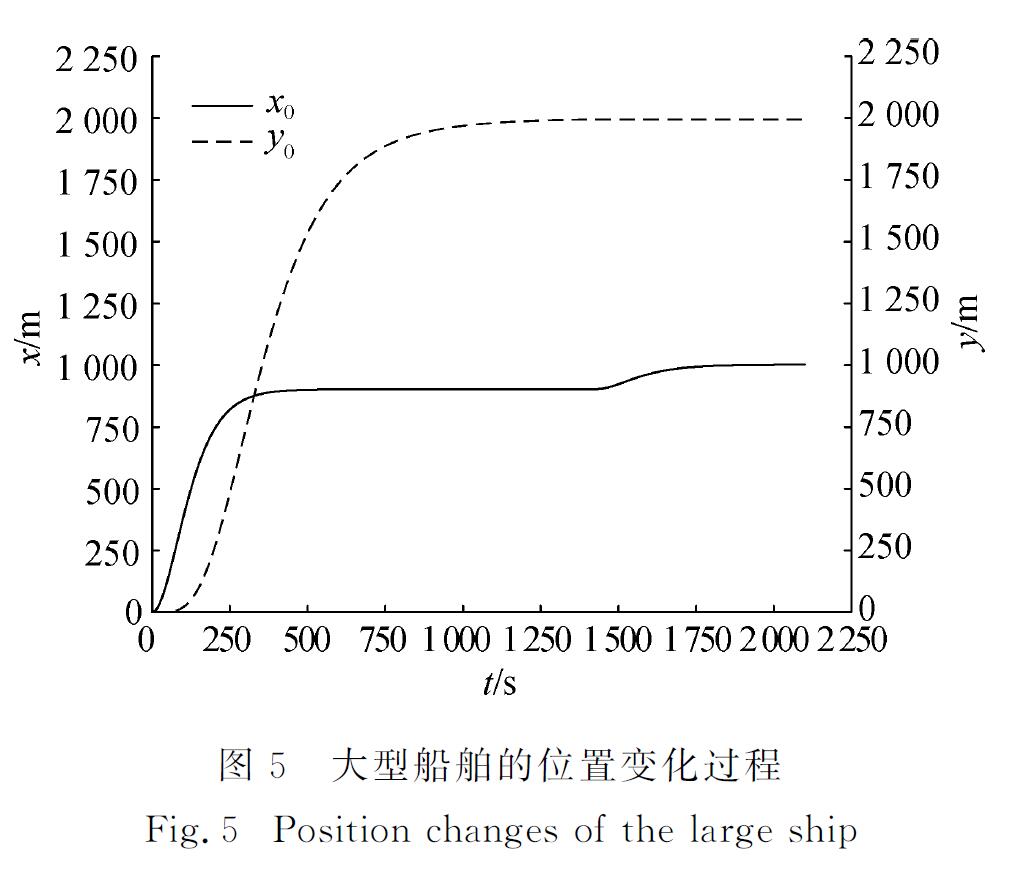
图5 大型船舶的位置变化过程
Fig.5 Position changes of the large ship4 结 论
本文中提出了应用拖轮编队控制方法来解决缺少侧推器的大型船舶靠泊问题.使用leader-follower方法,将已规划好路径和速度的虚拟船作为领航船,拖轮作为跟随船.当拖轮聚集在大型船舶周围时,组成虚拟刚性结构队形,拖轮编队的运动将带动大型船舶运动.采用干扰观测器来估计大型船舶对拖轮的未知反作用力并在控制器中补偿,适用于大型船舶水动力学模型未知情形.当拖轮不在大型船舶四周时,可将大型船舶作为领航船,拖轮作为跟随船,来实现拖轮的聚集.但在拖轮聚集过程中,需考虑大型船舶对拖轮的阻挡作用,否则拖轮可能无法到达期望位置,对此研究需进一步的工作.
- [1] 王祥科,李迅,郑志强.多智能体系统编队控制相关问题研究综述[J].控制与决策,2013,28(11):1601-1613.
- [2] THORVALDSEN C F L,SKJETNE R.Formation control of fully-actuated marine vessels using group agreement protocols[C]∥Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference.Orlando:IEEE,2011:4132-4139.
- [3] BREIVIK M,HOVSTEIN V E,FOSSEN T I.Ship formation control:a guided leader-follower approach[C]∥Proceedings of the 17th IFAC World Congress.Seoul:IFAC,2008:16008-16014.
- [4] 王昊,王丹,彭周华,等.多自主船协同路径跟踪的自适应动态面控制[J].控制理论与应用,2013,30(5):637-643.
- [5] XIANG X B,LAPIERRE L,JOUVENCEL B,et al.Coordinated path following control of multiple nonholonomic vehicles[C]∥Proceedings of Oceans'09.Bremen:IEEE,2009:1-7.
- [6] CUI R,GE S S,HOW B V E,et al.Leader-follower formation control of underactuated autonomous underwater vehicles[J].Ocean Engineering,2010,37(9):1491-1502.
- [7] PENG Z H,WANG D,CHEN Z Y,et al.Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics[J].IEEE Transcations on Control Systems Technology,2013,21(2):513-520.
- [8] PEYMANI E,FOSSEN T I.Leader-follower formation of marine craft using constraint forces and lagrange multipliers[C]∥Proceedings of the 51st IEEE Conference on Decision and Control.[S.l.]:IEEE,2012,2447-2452.
- [9] 夏盈盈,孙洪飞.基于循环追踪的船舶圆形编队控制[J].厦门大学学报(自然科学版),2015,54(1):93-98.
- [10] HASEGAWA K,KITERA K.Mathematical model of manoeuvrability at low advance speed and its application to berthing control[C]∥Proceedings of the 2nd Japan-Korea Joint Workshop on Ship and Marine Hydrodynamics.Nantes:Oceans,1993:144-153.
- [11] IM N,LEE S K,BANG H D.An application of ann to automatic ship berthing using selective controller[J].International Journal on Marine Navigation and Safety of Sea Transportation,2007,1(1):101-105.
- [12] BUI V P,KIM Y B,YONG W C,et al.A study on automatic ship berthing system design[C]∥Proceedings of the 2009 IEEE International Conference on Networking,Sensing and Control.Okayama:IEEE,2009:181-184.
- [13] AHMED YA,HASEGAWA K.Experiment results for automatic ship berthing using artificial neural network based controller[C]∥Proceedings of the 19th IFAC World Congress.Oxford:IFAC-Elsevier Ltd,2014:2658-2663.
- [14] 杜佳璐,杨杨,郭晨.基于高增益观测器的船舶动力定位系统的输出反馈控制[J].控制理论与应用,2013,30(11):1486-1491.
- [15] DU J,HU X,KRSTIC ' M,et al.Robust dynamic positi-oning of ships with disturbances under input saturation[J].Automatica,2016,73(11):207-214.
- [16] ESPOSITO J,FEEMSTER M,SMITH E.Cooperative manipulation on the water using a swarm of autonomous tugboats[C]∥Proceedings of the 2008 IEEE International Conference on Robotics & Automation.Pasadena:IEEE,2008:1501-1506.
- [17] BUI V P,KAWAI H,KIM Y B,et al.A ship berthing system design with four tug boats[J].Journal of Mechanical Science & Technology,2011,25(5):1257-1264.
- [18] JI S W,BUI V P,BALACHANDRAN B,et al.Robust control allocation design for marine vessel[J].Ocean Engineering,2013,63(3):105-111.
- [19] BIDIKLI B,TATLICIOGLU E,ZERGEROGLU E.Robust control design for positioning of an unactuated surface vessel[C]∥Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systemss.Hamburg:IEEE,2015:1071-1076.
- [20] BIDIKLI B,TATLICIOGLU E,ZERGEROGLU E.Robust dynamic positioning of surface vessels via multiple unidirectional tugboats[J].Ocean Engineering,2016,113(3):237-245.
- [21] CHEN W H,YANG J,GUO L,et al.Disturbance-observer-based control and related methods:an overview[J].IEEE Transactions on Industrial Electronics,2016,63(2):1083-1095.
- [22] DUAN Z S,WANG J Z,HUANG L.Special decentralized control problems in discrete-time interconnected systems composed of two subsystems[J].Systems & Control Letters,2007,56(3):206-214.
- [23] DUAN Z S,WANG J Z,CHEN G R,et al.Stability analysis and decentralized control of a class of complex dynamical networks[J].Automatica,2008,44(4):1028-1035.
- [24] 陈成,何玉庆,卜春光,等.基于四阶贝塞尔曲线的无人车可行轨迹规划[J].自动化学报,2015,41(3):486-496.
- [25] FOSSEN T I,STRAND J P.A tutorial on nonlinear backstepping:applications to ship control[J].Modeling,Identification and Control,1999,20(2):83-134.
