在四旋翼飞行器姿态小角度变化的情况下,忽略机体坐标系下三轴角速度与欧拉角速率的差异; 忽略旋翼重心至机体重心的垂直距离; 忽略风的干扰,不计空气摩擦; 假设飞行器质量分布均匀,重心位于机体几何中心.记在地面坐标系下四旋翼飞行器中心相对原点的坐标为[x,y,z],欧拉角为[φ,θ,ψ],则根据牛顿-欧拉方程可得系统的数学模型为[13-14]:
{φ ··=((Jy-Jz)/(Jx))(·overθ)(·overψ)+(jr)/(Jx)(·overθ)(-Ω1+
Ω2-Ω3+Ω4)+l/(Jx)U2,
θ ··=((Jz-Jx)/(Jy))(·overφ)(·overψ)-(jr)/(Jy)(·overφ)(-Ω1+
Ω2-Ω3+Ω4)+l/(Jy)U3,
ψ ··=((Jx-Jy)/(Jz))(·overφ)(·overθ)+1/(Jz)U4,
x ··=1/mU1(sin θcos ψcos φ+sin ψsin φ),
y ··=1/mU1(sin θsin ψcos φ-cos ψsin φ),
z ··=1/mU1cos θcos φ-g,(6)
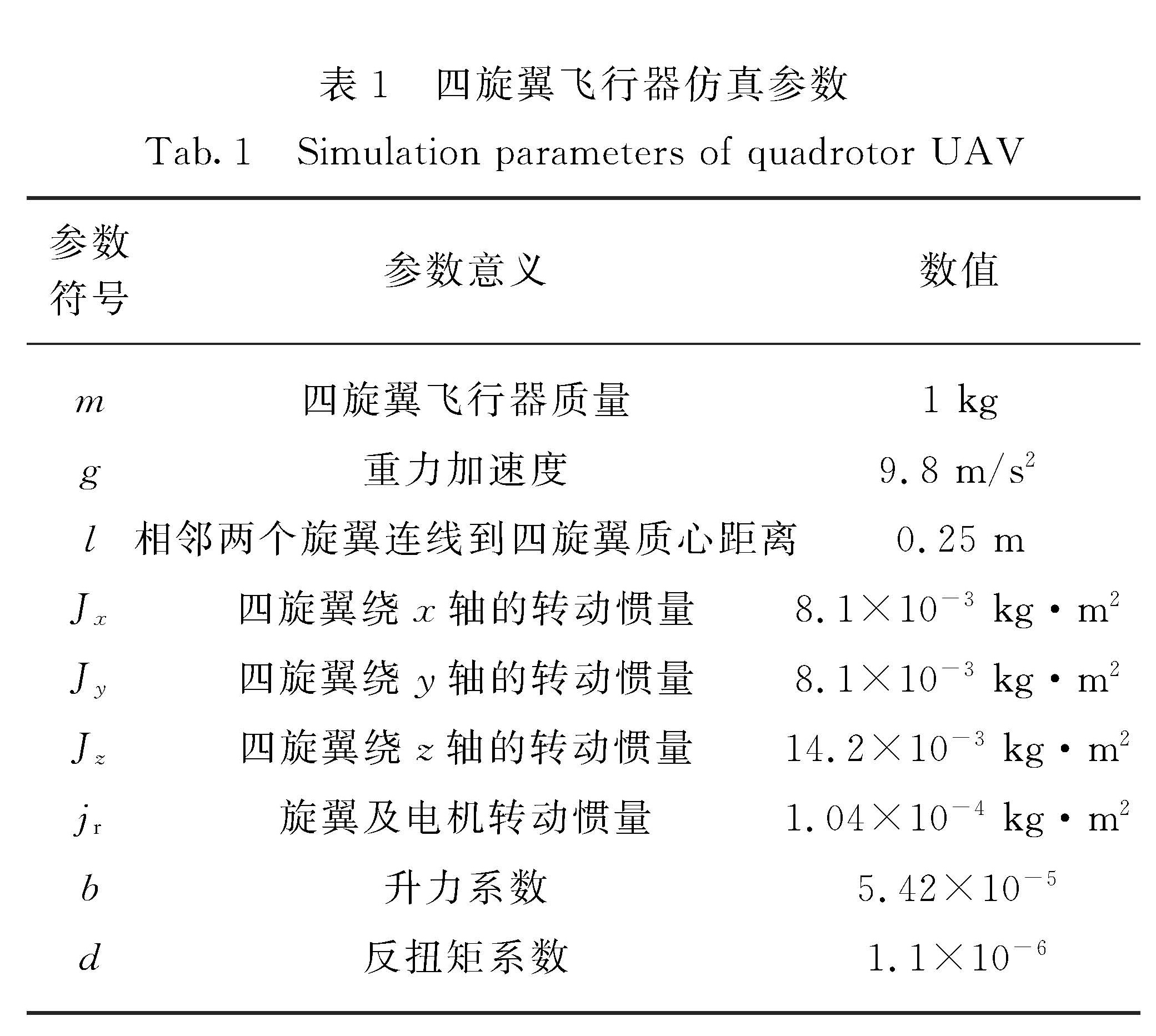
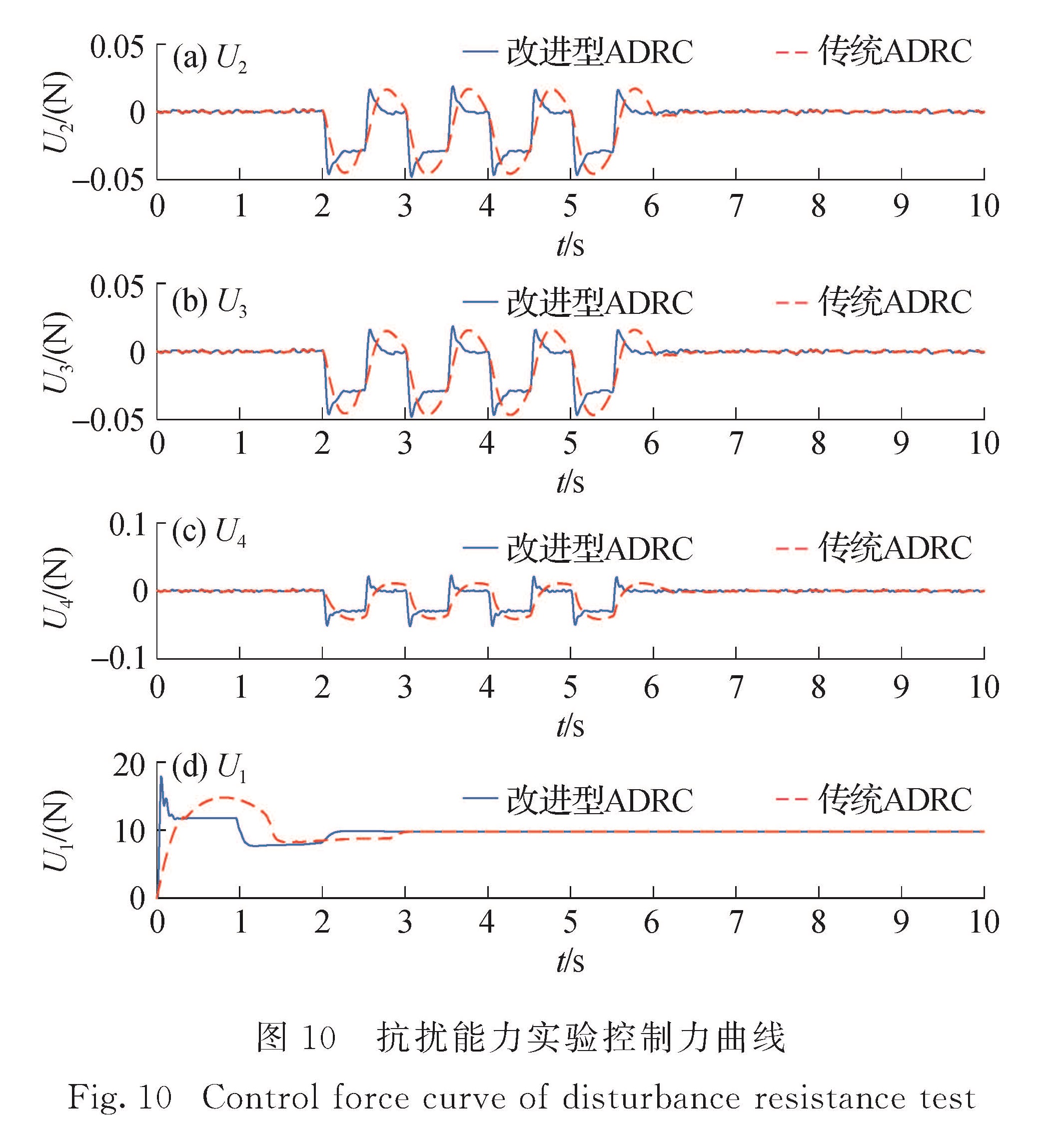
式中,m为飞行器质量,g为重力加速度,l为旋翼重心到机体重心的距离,[Jx,Jy,Jz]为飞行器绕3个机体轴的转动惯量,jr为电机和旋翼的转动惯量,U1~U4分别为高度通道、滚转通道、俯仰通道、偏航通道的控制输入,其值分别为:
{U1=b(Ω21+Ω22+Ω23+Ω24),
U2=b(-Ω21+Ω22+Ω23-Ω24),
U3=b(-Ω21-Ω22+Ω23+Ω24),
U4=d(-Ω21+Ω22-Ω23+Ω24),(7)
式中,Ωi(i=1,2,3,4)为各旋翼转速,b为旋翼升力系数,d为反扭矩系数.
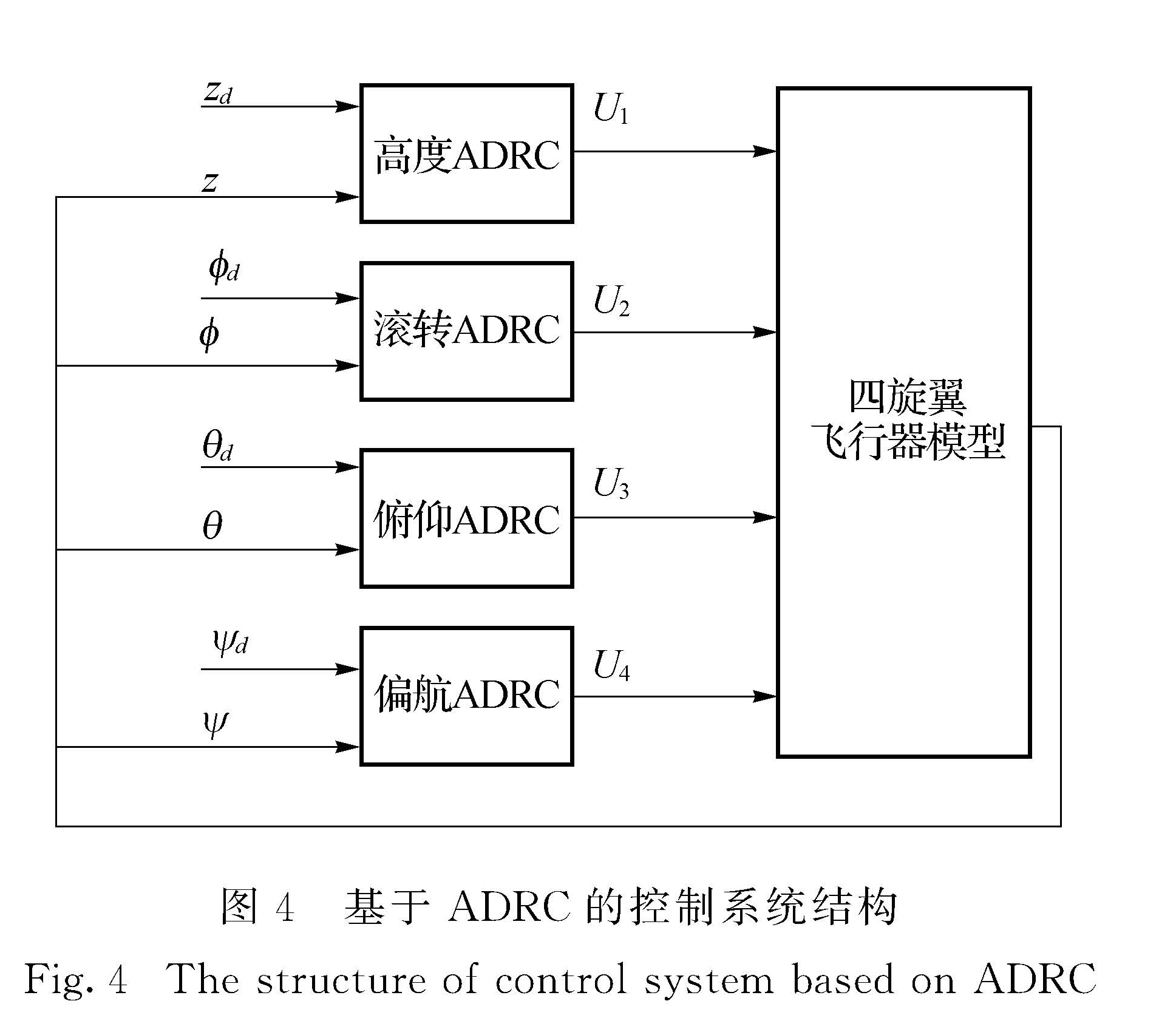
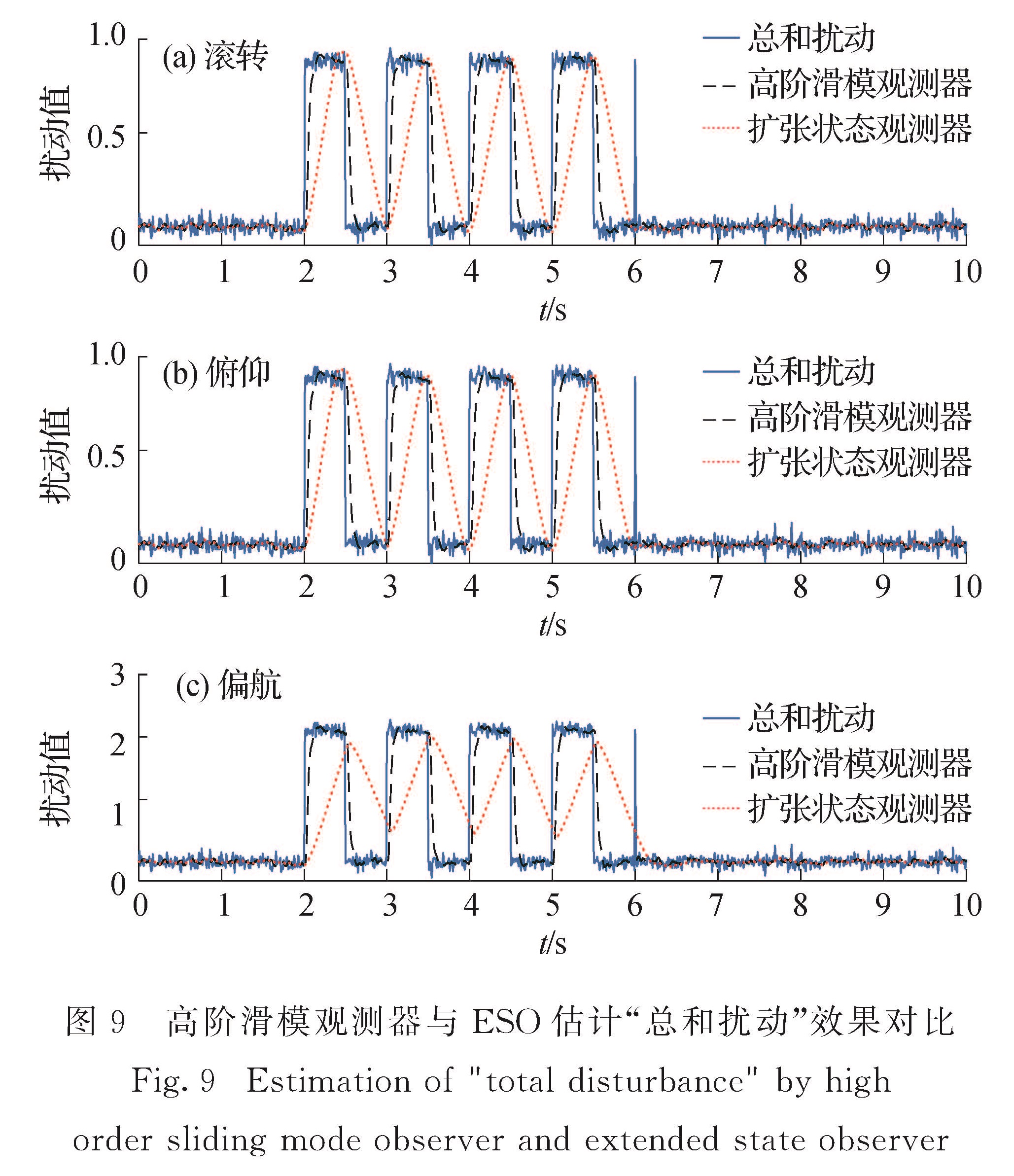
从上述模型中可以看出,四旋翼滚转、俯仰和偏航3个姿态通道以及高度通道之间相互耦合,本文中通过引入估计鲁棒性更强且具有有限时间稳定性的高阶滑模观测器对系统各状态和“总和扰动”进行估计,并对“总和扰动”进行补偿.进而每个控制通道由原来的非线性、不确定对象变为积分串联型线性系统,实现了各通道的解耦控制,将系统分为4个独立的控制通道:高度通道、俯仰通道、滚转通道和偏航通道,系统结构图如图4所示.
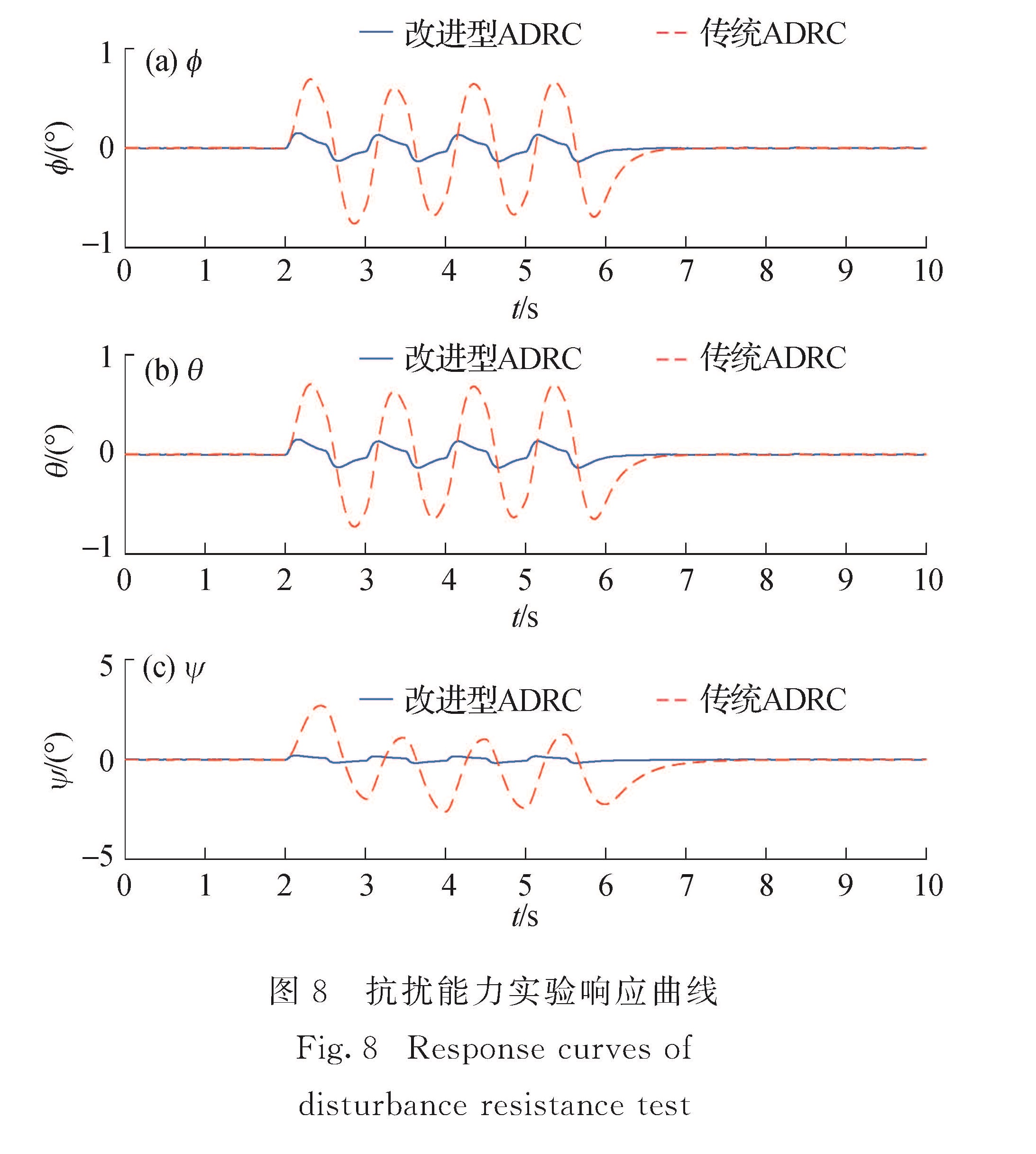
图4 基于ADRC的控制系统结构
Fig.4 The structure of control system based on ADRC
为便于阐述控制策略,将四旋翼姿态系统模型写成与ADRC理论相对应的形式:
{z ··=f1(z,(·overz),ω1)-g+b1U1,
φ ··=f2(φ,(·overφ),θ,(·overθ),ψ,(·overψ),ω2)+b2U2,
θ ··=f3(φ,(·overφ),θ,(·overθ),ψ,(·overψ),ω3)+b3U3,
ψ ··=f4(φ,(·overφ),θ,(·overθ),ψ,(·overψ),ω4)+b4U4,(8)
式中fi(·)(i=1,2,3,4)为各通道所受“总和扰动”,为内部扰动.
ADRC以及高阶滑模观测器的设计完全满足分离性原理,即四旋翼姿态控制系统可以每个控制通道分别独立设计TD、高阶滑模观测器和NLSEF.下面以俯仰通道为例,给出俯仰通道完整控制算法.
被控对象
θ ··=f3(φ,(·overφ),θ,(·overθ),ψ,(·overψ),ω3)+b3U3.(9)
1)TD安排过渡过程
{fh=fhan(θd1(k)-θd(k),θd2,r,h),
θd1(k+1)=θd1(k)+hθd2(k),
θd2(k+1)=θd2(k)+hfh,(10)
式中:θd为俯仰通道指令输入,θd1为指令输入跟踪信号,θd2为θd1的微分信号,r为速度因子,h为积分步长,以及最速控制综合函数:
{d=rh,d0=dh,y=x1+hx2,
a0=(d2+8r|y|)1/2,
a={x2+(a0-d)/2sgn(y),|y|>d0,
x2+y/h,|y|≤d0,
fhan(x1,x2,r,h)=-{(ra)/d,|a|≤d0,
rsgna,|a|>d0,(11)
2)高阶滑模观测器估计状态和“总和扰动”
{(·overz)1=v1,
v1=-λ1L1/3|z1-θ|2/3sgn(z1-θ)+z2,
(·overz)2=(^overf)3+b3U3,
(^overf)3=-λ2L1/2|z2-v1|1/2sgn(z2-v1)+z3,
(·overz)3=-λ3Lsgn(z3-(^overf)3),(12)
式中:z1为俯仰角θ的估计值,z2为俯仰角速度θ ·的估计值,z3为俯仰通道“总和扰动”f3(·)的估计值.
3)扰动补偿与控制量形成
{e1=θd1(k)-z1(k),
e2=θd2(k)-z2(k),
u0(k)=β1fal(e1,α1,δ0)+β2fal(e2,α2,δ0),
U3(k)=u0(k)-(z3)/b,(13)
其中
fal(e,α,δ)={|e|αsgne,|e|>δ,
e/(δ1-α),|e|≤δ,δ>0.(14)
高度通道、滚转通道以及偏航通道控制器设计与俯仰通道类似.