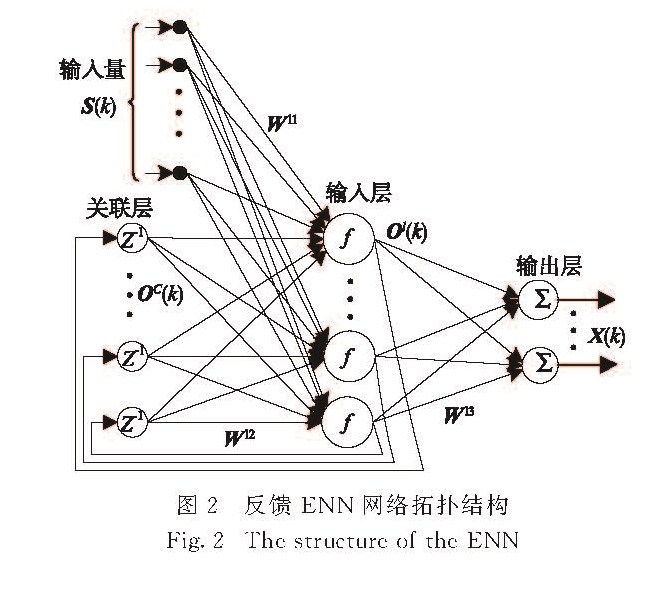
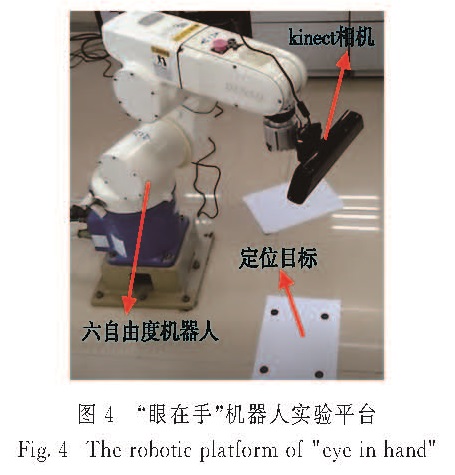
如图4所示,采用微软公司Kinect摄像机,并将摄像机固定在机器人末端,组成“眼在手”机器人实验平台.摄像机通过USB接口与个人PC相连,PC 通过 RS232 串口与机器人控制器相连接,构成机器人视觉伺服闭环系统.PC作为上位机主要完成图像采集与图像处理,并执行雅可比估计算法和伺服控制算法,机器人控制器作为下位机完成机器人运动学运算,同时驱动机器人各个关节.定位试验以六自由度机器人末端线速度和角速度为控制量,即U(k)∈R6×1,以A4纸打印4个黑点为定位特征,那么特征向量S(k)为:
S(k)=[s1 s2 s3 s4]T∈R8×1,(22)
式中si=(ui vi)为第i个图像点,所以图像雅可比矩阵大小为8×6,初始化为:
J(0)=
[-0.66 0 0.11 -0.02 -1.02 -0.16
0 -0.66 -0.10 1.02 0.02 -0.16
-0.66 0 0.11 0.02 -1.02 0.16
0 -0.66 0.11 1.02 -0.02 -0.16
-0.66 0 -0.11 -0.02 -1.02 0.16
0 -0.66 0.11 1.02 0.02 0.16
-0.66 0 -0.10 0.02 -1.02 -0.16
0 -0.66 -0.11 1.02 -0.02 0.16],(23)
由式(6)可知,系统状态向量X(k)大小为48×1,令状态转移矩阵φ(k)为单位矩阵,大小为48×48,控制率由实验经验选定为λ=0.15,采样间隔为0.1 s.
图4 “眼在手”机器人实验平台
Fig.4 The robotic platform of "eye-in-hand"
为了验证本文中非标定视觉伺服方法(简称本文方法)的有效性,以经典PBVS和IBVS方法[2]为比较对象,进行机器人大范围定位试验.试验中PBVS和IBVS需要摄像机内部参数(本文中方法不需要摄像机参数),摄像机参数有:图像中心u0=v0=256,摄像机焦距ηku=ηkv=1 000,ku、kv分别为图像U、V轴方向上的比例因子.为了体现机器人大范围定位,机器人初始位姿与期望位姿分别设定在机器人运动范围的最大边缘和最小边缘处,对应初始图像特征为S(0)=[378,235,429,301,363,354,311,289]T,期望图像特征为Sd=[47,47,464,45,460,463,40,459]T.
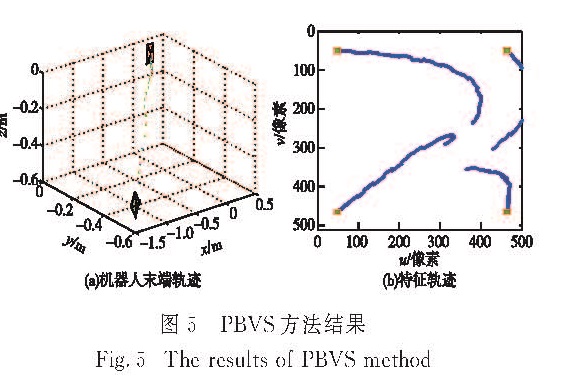
PBVS方法试验结果如图5所示(图中小方块代表特征点期望位置),由图5(a)可知,虽然PBVS方法机器人末端从初始位姿定位到期望位姿,机器人运动轨迹几乎接近直线,震动小,但是图5(b)图像特征运动轨迹不佳,特征点容易超出摄像机视场范围.
图5 PBVS方法结果
Fig.5 The results of PBVS method
IBVS方法试验结果如图6所示,图6(a)机器人运动轨迹不稳定,机器人在起始段产生较大震动.由图6(b)可知,虽然IBVS方法图像特征轨迹以直线方式从初始位置收敛到期望位置,特征点保持在摄像机视场范围内,
图6 IBVS方法结果
Fig.6 The results of IBVS method
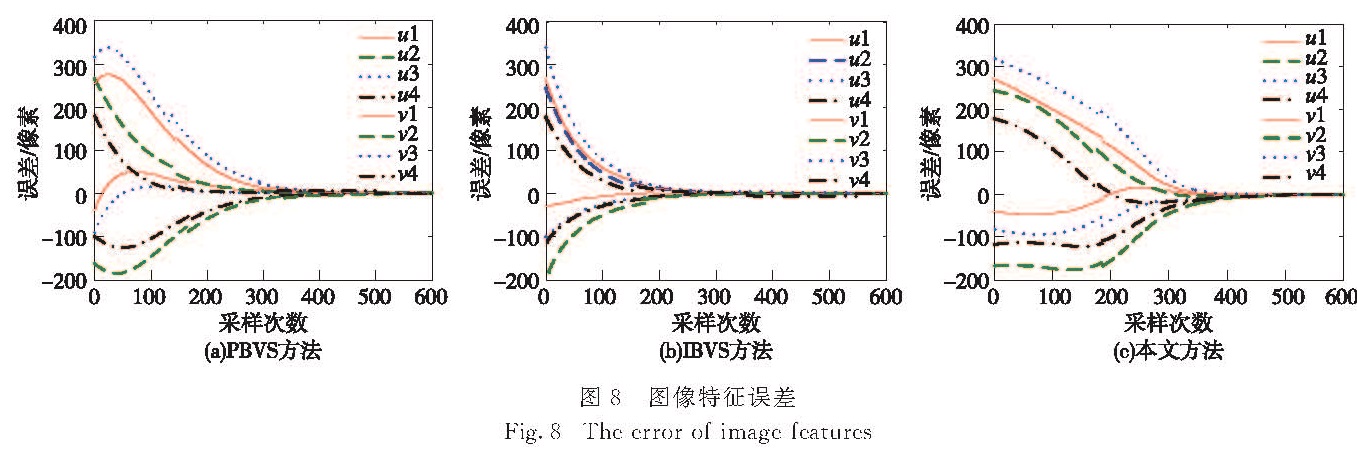
本文方法试验结果如图7所示,由图7(a)可知,本文方法机器人几乎以直线方式从初始位姿定位到期望位姿,机器人运动轨迹稳定,震动小; 同时由图7(b)可知,图像特征轨迹以近直线方式从初始位置收敛到期望位置,并且特征点保持在摄像机视场范围内.图8为机器人定位误差,3种伺服方法图像误差收敛趋向于0,机器人定位成功.
图7 本文方法结果
Fig.7 The results of proposed method
以上比较试验可知,PBVS方法机器人运动轨迹良好,但图像特征轨迹容易偏离摄像机视场范围; IBVS方法图像特征轨迹良好,但机器人运动轨迹初始段不稳定,产生较大震动; 而本文中方法机器人运动轨迹稳定无震动,图像特征轨迹保持在摄像机视场范围内,综合性能较好.
为了进一步验证本文方法的稳定性,考虑外界干扰,通过与传统KF方法比较说明本文方法的稳定性能.机器人真实环境操作过程,系统过程噪声和传感器观测噪声的摄动,都将导致系统不稳定.不失一般性,试验中假设过程噪声F(k)和观测噪声V(k)为零均值,方差分别为Q=1.2×[1 … 0
0 … 1]∈R48×48,R=0.1×[1 … 0
0 … 1]∈R8×8的白噪声序列.设定初始图像特征S(0)=[272,336,315,420,230,465,186,380]T,期望图像特征Sd=[89,89,422,80,420,423,85,425]T.
图8 图像特征误差
Fig.8 The error of image features
传统KF方法试验结果如图9所示,图9(a)为3D笛卡尔空间机器人运动轨迹,图9(b)为2D图像平面特征点运动轨迹.由图9(a)可知,在噪声干扰影响下机器人末端出现较大幅度的绕行回退运动,进而导致图像特征轨迹扭曲,特征点偏离摄像机视场范围(见图9(b)).
图9 KF算法结果
Fig.9 The results of KF
而对于相同干扰条件下的机器人定位任务,本文中KF联合ENN方法试验结果如图 10所示,图 10(a)为3D笛卡尔空间机器人运动轨迹,图 10(b)为2D图像平面特征点运动轨迹.由图 10(a)可知,机器人运动轨迹稳定,无绕行回退现象产生; 同时由图 10(b)可知,图像特征轨迹平滑,特征点保持在摄像机视场范围内.
图 10 KF联合ENN结果
Fig.10 The results of KF unite ENN
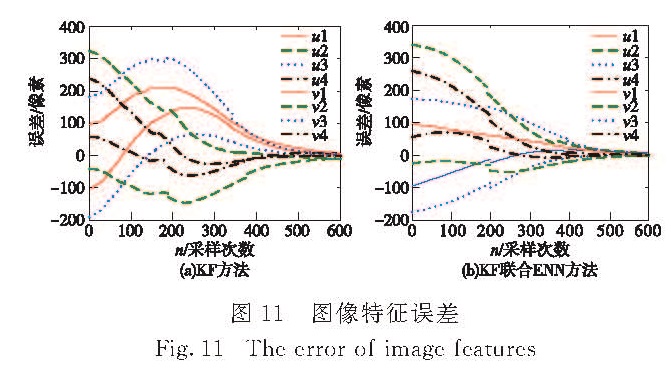
另外,由图 11可以看出,在额定的采样时间内,本文中KF联合ENN方法图像误差收敛速度较KF方法快.以上结果其主要原因是首先由ENN得到机器人全局定位的次优状态,在这基础上KF实施雅可比精确估计,并实时调整ENN网络权重,这种联合工作方式有利于保证机器人全局空间运动的稳定性.
图 11 图像特征误差
Fig.11 The error of image features
综上可知,在未知摄像机参数及目标深度信息条件下,与经典PBVS和IBVS方法相比,本文中研究的非标定图像视觉伺服控制方法性能良好.在考虑外界噪声干扰条件下,和传统KF方法相比,本文KF联合ENN方法改善了机器人运动的稳定性能,并具有一定的自适应能力.说明本文研究的KF联合ENN网络的图像雅可比动态估计方法,及构建的非标定视觉伺服控制方案真实有效.