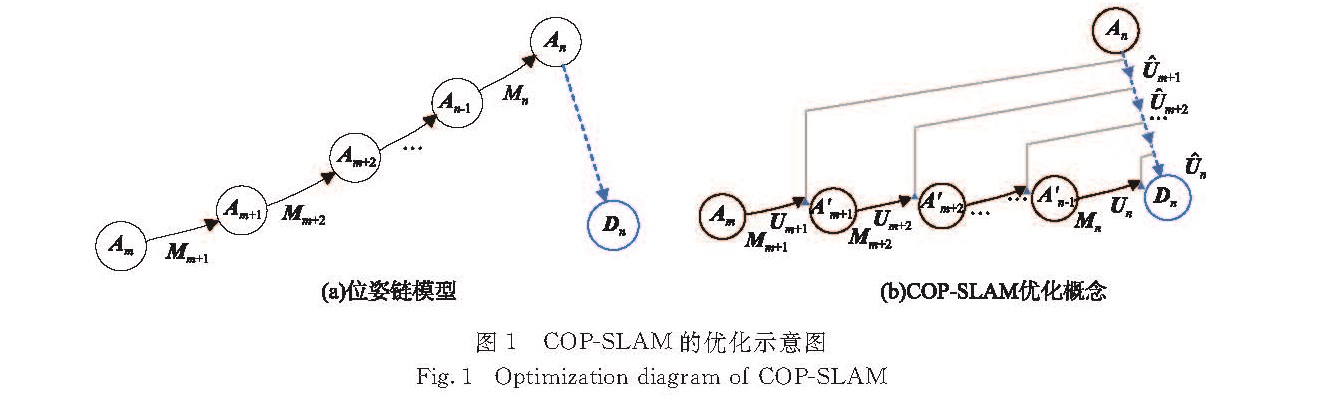
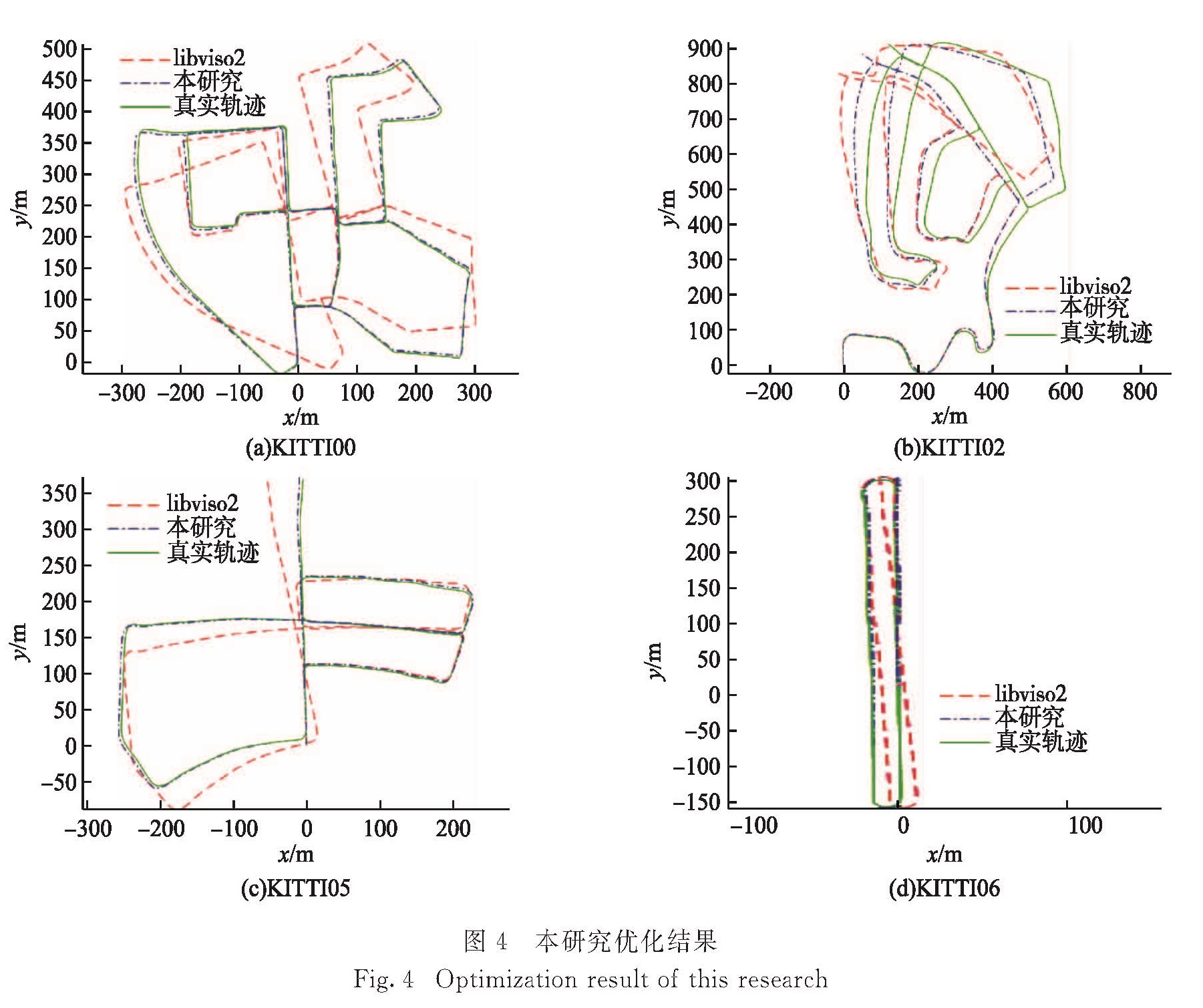
COP-SLAM(closed-form online pose-chain simultaneous locatization and mapping)是一种轻量型图优化算法,可以实时优化.但当局内特征点集中位于图像的特定区域时,其信息矩阵不能很好地表征里程计精度,影响实时优化效果.基于局内特征点的分布,引入局内点集的面积表示局内点的分布,提出了一种视觉里程计的后端图优化方法.实验结果表明,该优化方法有效地降低了相机绝对轨迹误差.
Closed-form online pose-chain simultaneous locatization and mapping(COP-SLAM)is a lightweight graph optimization algorithm that meets real-time constraints.However,it cannot be a good measure of visual odometry accuracy when inlier points are mainly distributed on the specific region of the image,affecting the real-time optimization results.A general approach to back-end graph optimization of visual odometry is proposed based on inlier distribution.The area of inlier set is introduced to represent inlier distribution.Experimental results have demonstrated that the method can effectively reduce absolute trajectory errors.