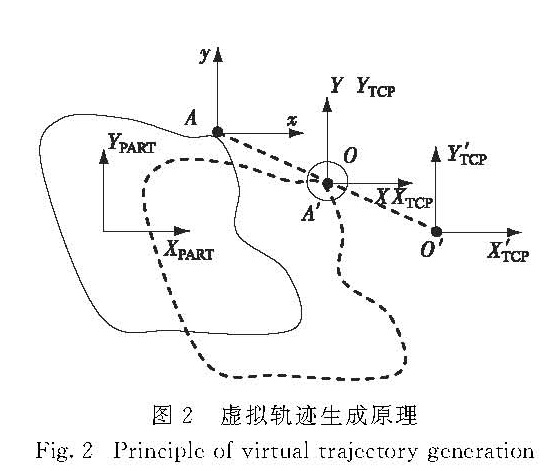
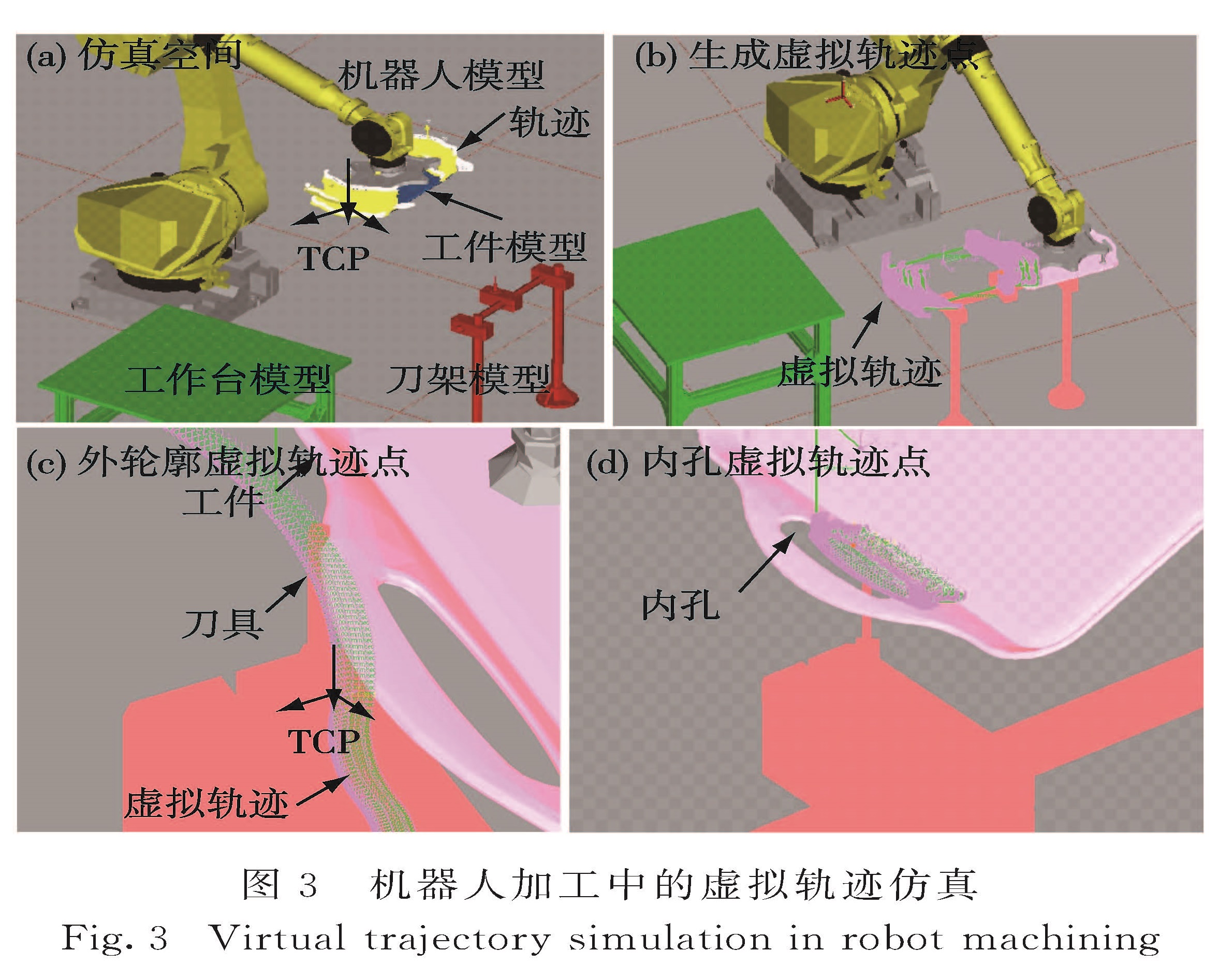
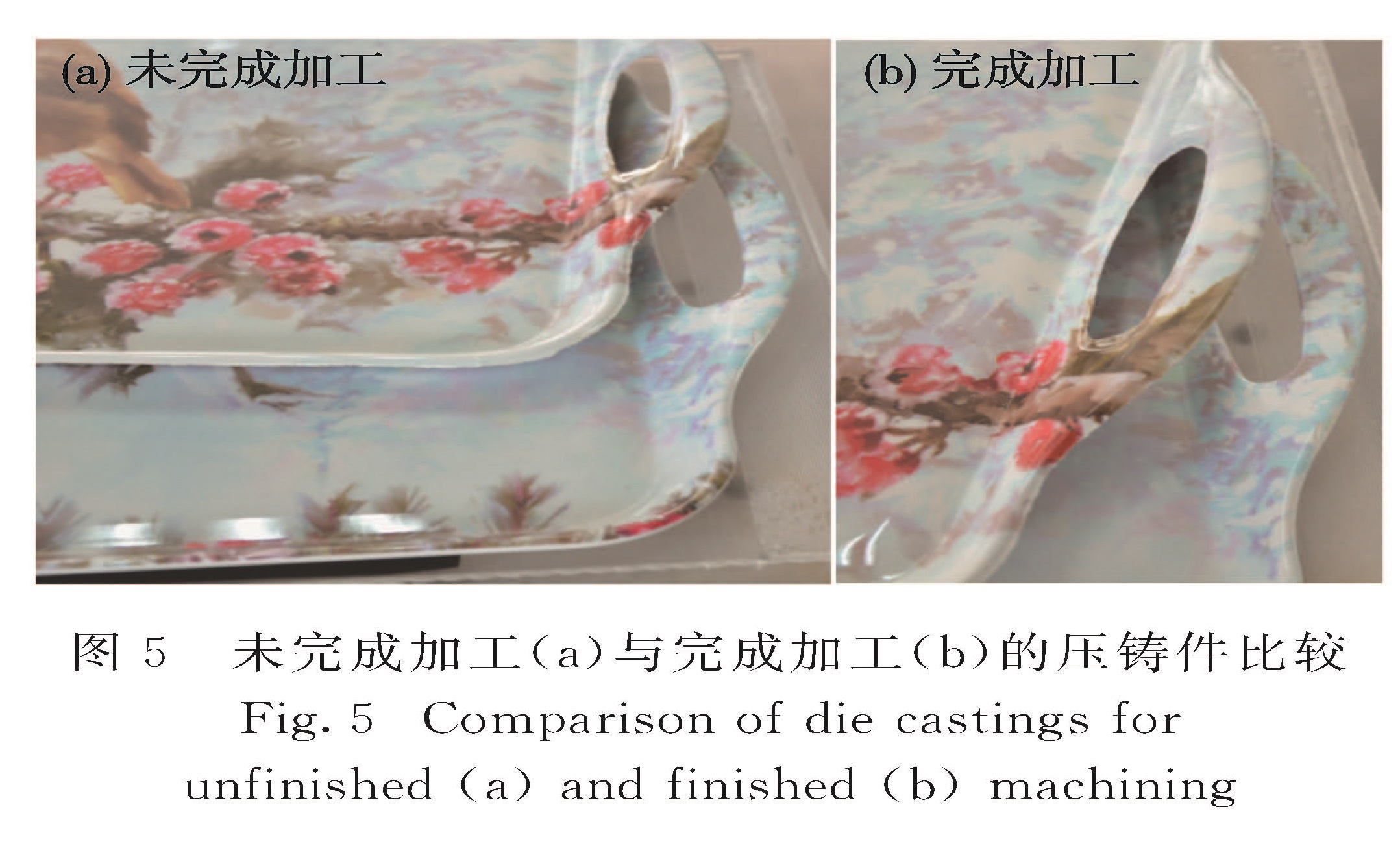
将机器人用于压铸件产品加工,需要解决软件自动生成加工轨迹,建立一致性的虚拟模型空间与实际模型空间等技术.采用机器人及其末端的标定工具,获得机器人与工作台、机器人与刀架之间的变换矩阵,从而建立虚拟模型空间和实际模型空间的一致性.利用CAM软件生成加工工件的刀具轨迹,通过后处理方法将刀具轨迹转换成机器人加工轨迹.对生成的轨迹点进行转换,形成工件绕刀具平动的虚拟加工轨迹.实验结果表明,与理论加工轨迹相比,实际加工轨迹形成了2 mm左右的系统误差,该误差由机器人零位误差和本体几何误差产生,通过缩放工件模型来产生轨迹,可以有效消除系统误差.消除系统误差后的加工精度可以达到±0.1 mm,满足压铸件去除毛边的加工要求.
The robot is used in die casting.It is necessary to solve the problem,in which the machining path is generated by software,and establishment of spatial consistency between virtual model space and real model,and so on.In this paper,transformation matrix between the robot and the workbench,as well as between the robot and the tool holder are obtained by using the robot and its calibration tool,and the consistency between virtual model space and real model is achieved.Then,the tool path of the workpiece is generated by using the universal CAM software,and the tool path is transformed into the machining path.Finally,the generated trajectory point conversion leads to the virtual machining locus of workpiece around tool motion.Experimental results show that,compared with the theory of machining trajectory,the actual machined path yields an approximately 2 mm system error,which is generated by the robot-body zero error and geometric error.The zoom-workpiece model generated trajectory can effectively eliminate the system error.Eliminating the system error after the processing precision,we are capable of reaching ±0.1 mm,and meet the processing pressure casting burr removing requirements.