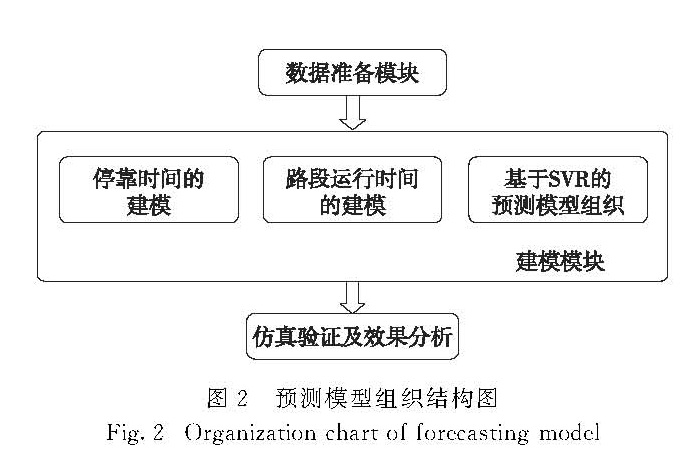
本研究对BRT车辆到站时间预测模型包括两部分:路段运行时间预测和车站停靠时间预测.首先对通过厦门BRT-1路采集到的数据进行处理,接着分别建立ε-SVR模型来预测车站停靠时间和路段运行时间,最后建立模型并进行实验验证与效果分析.
3.2 BRT车辆停靠时间分析
对BRT的研究发现23%的时间花费在乘客上下车(即停靠时间),而52%的时间在路段上行驶[15],可以看出,站点停靠对BRT总运行时间的影响很大.
BRT停靠站的场景如图3所示[16],具备两个停靠位的停靠站,与厦门BRT的停靠位类型一致.图中红色车表示即将进站车辆,蓝色车表示预测车的前一辆公交车.在图3场景中A、B 2种场景下红色车辆进站都无需等待,直接进空闲的停靠位,而场景C中红车辆需要排队等待前车驶离方可进站.本文中只考虑A,B 2种场景下的车辆进站情况,即预测中不考虑排队等候时间.
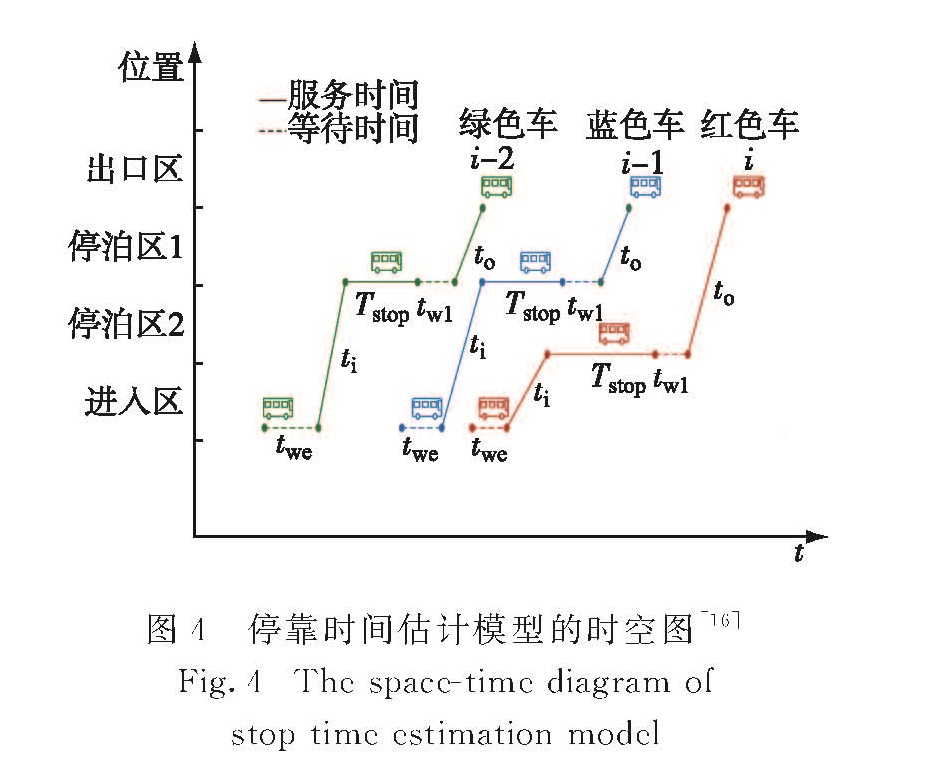
BRT车辆在站点的停靠过程可以描述为:车辆减速进入停靠站—开启车门—在站点停车上下乘客—关闭车门—车辆加速驶离停靠站.BRT车辆进出停靠站总时间即停靠站服务时间包括车辆进站减速时间、车辆到站停靠时间和车辆出站加速时间,如图4所示.图中所示的第i辆红色车即为所预测的车辆,蓝色和绿色均表示其前2辆车.每辆车的停靠站过程均由各自的曲线表示:虚线twe、twl分别表示进站、出站排队等待时间,本文中不予考虑; 实线ti、Tstop、to分别表示进站减速时间、停靠时间和出站加速时间.故BRT车辆进出停靠站总时间Tdwell计算公式为:
Tdwell=ti+Tstop+to.(6)
图3 BRT停靠站的3种场景
Fig.3 Three scenarios for the BRT station
图4 停靠时间估计模型的时空图
Fig.4 The space-time diagram of stop time estimation model
根据TCRP Report100,车辆开/关门时间一般为1~3 s.根据HCM 2000,车辆的停靠时间分布属于连续型分布,可得到车辆停靠时间T的计算公式[17]
T=(n1·t1+n2·t2)/2+t0,(7)
式中:n1、n2分别为车辆上/下车人数(人/辆); t1 、t2分别为单位乘客上下车时间(s/人); t0为车辆开/关门时间.
一般来说,某条线路的第i辆车的停靠时间Tistop 可以通过下式计算得到:
nb=min( ∫tiar-ti-1arQpeddt,Cbus(1-p)+na),(8)
Tistop=t0+(na×ta^-+nb×tb^-)/2.(9)
式中:na,nb分别表示第i辆车的下车乘客数和上车乘客数; tiar,ti-1ar 分别表示第i辆和第i-1辆车的到站时间,单位s; Qped 表示该线路候车乘客的到达分布函数; Cbus表示车辆的最大载客量; P表示车辆到达本站前的满载率; ta^-,tb^-分别表示乘客的平均下车时间和平均上车时间.
对于上述公式,本文中假设公交车的载客能力能够满足站台候车乘客的需求,即∫tiar-ti-1arQped dt≤Cbus(1-p)+na.另一方面,由于受车门数量的限制,站台乘客的总上车时间一般要大于在车乘客的总下车时间,即na×ta^-≤nb×tb^-,同时(na×ta^-+nb×tb^-)/2≤nb×tb^-,此时公交车的停站时间为:
Tistop=t0+t0^-×∫tiar-ti-1arQpeddt.(10)
同理,对于第i辆车之前的第j辆车(j<i)也有:
Tjstop=t0+tb^-×∫tjar-tj-1arQpeddt=t0+tb^-×
(∫tiar-tj-1arQped dt-∫tiar-tjarQped dt).(11)
令t0和乘客的平均上车时间tb^-都取定值.候车乘客的到达分布与车辆的停靠时间以及车头时距存在对应关系:
Qped=f(T jstop,(tiar-tj-1ar),(tiar-tjar)).(12)
结合式(10)~(12),第i辆车的停靠时间Tistop 可以表示为:
Tistop=F(Qped,(tiar-ti-1ar))=F(Tjstop,(tiar-
tj-1ar),(tiar-tjar),(tiar-ti-1ar)),
(j=i-1,i-2,…).(13)
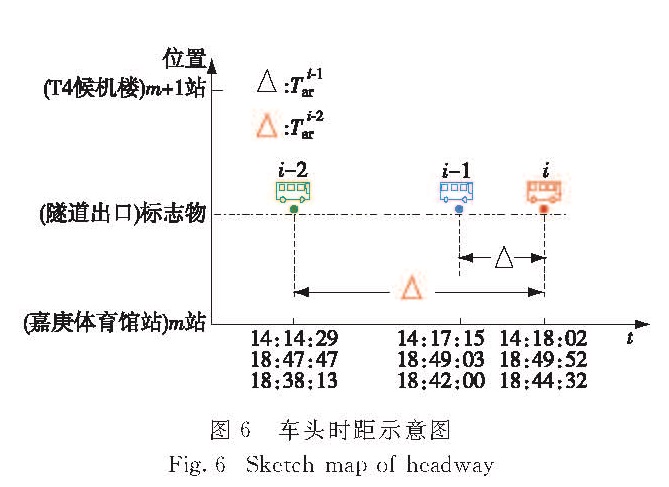
可见,第i辆车在本站的停靠时间Tistop 与之前的第j辆车的停靠时间Tjstop 有关,同时也与前2辆车的车头时距有关.综上所述,本文中选取当前车与前2辆车的车头时距 Tjar=tiar-tjar,前2辆公交车的停靠时间Tjstop(j=i-1),以及时段、天气和节假日作为预测模型的输入特征向量(包括7个维度),即:Tistop=F'([Ti-1stop,Ti-2stop,Ti-1ar,Ti-2ar,Ct,Cw,Ch]).
本文中采用ε-SVR模型,基于历史数据对上述输入特征向量xistop=(Ti-1stop,Ti-2stop,Ti-1ar,Ti-2ar,Ct,Cw,Ch)与Tistop 的关系进行拟合,从而得出BRT车辆在车站停靠时间的预测模型.
另外,根据BRT车辆平均ti为2.9 s[18],平均to为4.4 s,即可计算Tdwell.
3.3 BRT在相邻两站的运行时间
BRT在相邻两站的运行时间如图5所示.
图5 相邻两站的运行时间示意图
Fig.5 The Running time sketch map of two adjacent stations
Tm,m+1=T'm,m+1+Tdwell,(14)其中:Tm,m+1为车辆在第m站和m+1站间的运行时间; T'm,m+1 为车辆通过第m站和m+1站间路段的自由行驶时间.不考虑车辆之间的差别,第i辆车辆在某路段的自由行驶时间主要受车辆在路段内的平均车速(-overv)m,m+1,以及时段、天气、是否节假日的影响.故本文中选取的路段自由行驶时间预测模型的输入特征向量为(包括4个维度):x'm,m+1=((-overv)m,m+1,Ct,Cw,Ch).由此,Tm,m+1 即可预测.
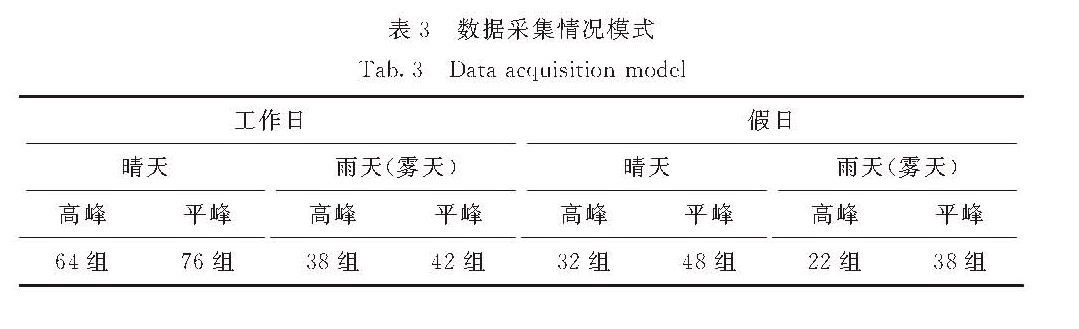
表3 数据采集情况模式
Tab.3 Data acquisition model
![表1 厦门BRT运行影响因素[10]<br/>Tab.1 The related factors in BRT operation in Xiamen[10]](2017年03期/pic114.jpg)