(School of Aerospace Engineering,Xiamen University,Xiamen 361005,China)
time-delay; input constraints; uncertain systems; mixed stability; finite-time stability
DOI: 10.6043/j.issn.0438-0479.201611035
备注
针对一类不确定线性时滞系统,同时考虑其暂态性能和稳态性能,提出了混合稳定的概念和控制策略,使得闭环系统在满足输入约束条件下,在给定的时间区间内有限时间稳定,在无穷时间区间上渐近稳定.将混合稳定控制问题转化为线性矩阵不等式(LMI)约束非凸优化具有可行解问题.通过锥补线性化算法求解状态反馈控制器使得闭环系统混合稳定.最后,通过一个无人机仿真来验证控制器设计方法的有效性.
For the purpose of aiming at a class of linear uncertain time-delay systems,the concept of mixed stabilization and control strategy are given under the consideration of the transient and steady performance.The closed-loop system obtained yields the finite-time stability within a given time interval,meanwhile it also yields an asymptotic stability in the sense of Lyapunov.Then the control problem can be transformed into a feasible problem of non-convex optimization with linear matrix inequality constraints.Moreover,the cone complementarity linearization algorithm is used to obtain a state feedback controller.Finally,simulation results of an unmanned aerial vehicle demonstrate the effectiveness of the method.
引言
系统稳定性问题一直是控制理论研究中的一个热点问题.Lyapunov渐近稳定在控制界已广为人知,它关注的是系统在无穷时间区间内的稳态性能,并不能反映系统的暂态性能.事实上,一个稳定系统如果具有较差的暂态性能(例如超调量过大,过渡时间过长)可能引起系统响应滞后,甚至无法在实际中应用.因此,有限时间稳定由于其注重系统在有限时间段的性能而引起控制界的广泛关注.
有限时间控制的问题得到许多学者的研究.Dorato[1]提出了有限时间稳定(FTS)的概念.Amato等[2]推广了FTS概念,提出了有限时间有界(FTB)的概念.Michel等[3]给出了离散时间系统FTS的验证条件.Garrard[4]研究非线性系统FTS的综合问题.San等[5]提出一种状态反馈控制器设计方法使得闭环系统满足FTS和给定的积分二次性能指标.Dorato等[6]针对多面体不确定性的线性连续时间系统的FTS综合问题,用LMI条件给出了系统FTS的充分条件.
实际应用中,控制系统应该具有良好的暂态和稳态性能,为同时保证这两种性能,需要将FTS和渐近稳定结合.目前,同时考虑暂态和稳态性能的研究还鲜有报道.林灿煌等[7]针对输入受限不确定线性系统,提出了混合稳定的概念和控制策略,但其没有考虑时滞现象且混合稳定控制器本质上是一个切换控制器,会存在潜在抖振且计算过程复杂.
时滞现象是影响系统稳定和性能的主要因素.根据稳定性条件是否依赖时滞的大小,可将其分为时滞无关和时滞相关.本文中研究时滞相关的稳定性条件(条件能够保证系统对于任意不大于某个值的时滞都是稳定的).目前针对时滞相关稳定性问题,学者们提出了多种研究方法[8-10].
在实际控制系统中,系统的执行器饱和(输入受限)无处不在.输入受限直接影响闭环系统的性能指标,甚至引起系统的不稳定.在处理输入受限问题时有两类方案:一类是在系统分析和控制器设计时就考虑饱和给系统带来的影响,避免饱和的发生[11-14]; 另一类是先不考虑输入受限的情况下对系统进行控制器设计,在执行器饱和的时候,采用附加设计的抗饱和补偿器来弥补系统发生饱和时的性能下降,以削弱执行机构的饱和特性带来的影响[15-17].
本文中针对不确定线性时滞系统,在避免饱和出现的情况下,给出了系统的时滞相关稳定性条件.对于控制器求解时遇到的非线性问题,采用锥补线性化算法[18],将其转化为LMI约束非凸优化具有可行解问题.
1 问题描述
考虑如下不确定线性时滞系统:
(·overx)(t)=(A0+ΔA0(t))x(t)+(A1+
ΔA1(t))x(t-τ)+(B+ΔB(t))u(t),(1)
x(t)=φ(t),t∈[-τ,0],
其中x(t)∈Rn为状态向量,u(t)∈Rm为控制输入向量,A0∈Rn×n,A1∈Rn×n,B∈Rn×m是已知的常数矩阵,τ>0是滞后时间.φ(t):[-τ,0]→Rn为系统的初始条件,假设不确定项有如下形式[18]:
ΔA0(t)=D0Δ(t)E0,ΔA1(t)=D1Δ(t)E1,
ΔB(t)=DBΔ(t)EB.(2)
其中:D0,D1,DB,E0,E1,EB是适当维数的常数矩阵,反映了模型不确定性的结构; Δ(t)是不确定参数矩阵,反映了系统模型中的参数不确定性的结构信息,满足
Δ(t)ΔT(t)≤I.(3)
控制输入满足
|ui(t)|≤uimax,uimax>0,i=1,2,…,m.(4)
在本文中要用到以下几个定义和引理.
定义1[19] 考虑时滞系统
(·overx)(t)=A0x(t)+A1x(t-τ),(5)
x(t)=φ(t),t∈[-τ,0],
对于给定的(c1,c2,T),其中0≤c1<c2,如果
supθ∈[-τ,0]φT(θ)φ(θ)≤c1xT(t)x(t)<c2,
t∈(0,T),(6)
那么称系统(5)是FTS的.
注1 李雅普诺夫渐近稳定(LAS)和FTS是两个独立的概念:LAS刻画的是一个系统在无穷时间区间上的稳态、渐近性; 而FTS关注的是在固定时间区间中系统的性能指标和状态轨迹,强调系统的暂态行为.一个FTS系统不一定是LAS的; 反之,一个LAS系统可能不是FTS,因为其状态可能在某个时刻超出给定范围.
定义2[7] 考虑时滞系统(5),如果系统关于(c1,c2,T)是FTS的,且在无穷时间区间上是LAS的,那么称系统(5)是混合稳定的.
引理1[20] 给定适当维数的矩阵Y,H,E和Δ(t),其中Δ是对称矩阵并且Δ(t)满足式(3),则
Δ+HΔ(t)E+ETΔT(t)HT<0(7)
成立,当且仅当存在一个标量λ>0使得
Y+λ-1HHT+λETE<0.(8)
引理2[21] 给定n维正定矩阵Θl和Λl,则ΘlΛl=I,(l=1,2,…,s),当且仅当
[Θl I
I Λl]≥0,l=1,2,…,s,(9)
且
tr{∑sl=1(ΘlΛl)}=sn.(10)
问题1 本文中要解决的问题是设计控制器
u(t)=Kx(t),(11)
使得u(t)满足输入受限条件(4),该控制器和系统(1)构成的闭环系统混合稳定,其中K为待求的状态反馈增益矩阵.本文中称这样的控制器为混合稳定控制器.
2 混合稳定控制器的设计
下面定理给出了系统(1)在满足输入受限条件(4)的情况下,混合稳定的一个充分条件.
定理1 考虑时滞系统(1),如果存在标量τ0>0,α≥0,λ>0,δ>0,ε>0和正定对称矩阵X∈Rn×n,Y∈Rn×n和矩阵Zm×n使得以下不等式成立:
[Ξ A1X XET0 0 ZTETB
XAT1 -Y 0 XET1 0
E0X 0 -λI 0 0
0 E1X 0 -δI 0
EBZ 0 0 0 -εI]<0,(12)
(c1)/(λmin(X-1))[λmax(X-1)+
τ0λmax(X-1YX-1)] eαT <c2,(13)
[u2imax/c2 Zi
ZTi X]≥0,i=1,2,…,m,(14)
其中Ξ=A0X+XA0T+BZ+ZTBT+Y+λD0D0T+δD1D1T+εDBDBT,Zi为矩阵Z的第i行.则对任意满足0≤τ≤τ0的滞后时间τ,存在形如式(11)的控制器,使得系统(1)和该控制器构成的闭环系统混合稳定且u(t)满足输入受限条件.其中状态反馈增益矩阵K=ZX-1.
证明 若存在满足矩阵不等式(12)~(14)的对称正定矩阵X,Y和矩阵Z,定义P=X-1Q=X-1YX-1,K=ZX-1,则u=Kx(t)是系统(1)的一个控制律.选取Lyapunov泛函
V(x(t))=xT(t)Px(t)+∫tt-τxT(θ)Qx(θ)dθ,(15)
V(x(t))关于时间的导数是
V·(x(t))=[x(t)
x(t-τ)]T
[Ω P(A1+D1Δ(t)E1)
(A1+D1Δ(t)E1)TP -Q]
[x(t)
x(t-τ)],(16)
其中Ω=(A0+D0Δ(t)E0+(B+DBΔ(t)EB)K)TP+P(A0+D0Δ(t)E0+(B+DBΔ(t)EB)K)+Q.由Schur补引理[19]可知,定理1中的式(12)等价于
[Γ+(-overΓ)A1X
XAT1 -Y+δXET1E1X]<0,(17)
其中
Γ=XAT0+A0X+ZTBT+BZ+Y,
(-overΓ)=λ-1D0DT0+λXET0E0X+εZTETBEB+
λ-1D0DT0+δ-1D1DT1+ε-1DBDTB.
对式(17)分别左乘和右乘矩阵diag{X-1,X-1},并将P=X-1,Q=X-1YX-1,K=ZX-1代入可得
[Σ+(-overΣ)PA1
AT1P -Q+δET1E1]<0,(18)
其中
Σ=AT0P+PA0+KTBTP+PBK+Q,
(-overΣ)=λ-1PD0DT0P+λE0TE0+ε-1PDBDBTP+
εKTEBTEBK+δ-1PD1D1TPT.
由引理1和Schur补引理可得,式(18)等价于
[Ω P(A1+D1Δ(t)E1)
(A1+D1Δ(t)E1)TP -Q]<0.(19)
由此可知V·(x(t))<0,系统是渐近稳定的.由于α≥0,
V·(x(t))<0≤αV(x(t)).(20)
对式(20)从0到t积分,t∈[0,T]可得
V(x(t))<eαtV(x(0)),
V(x(t))<eαt(xT(0)X-1x(0)+
∫0-τxT(θ)X-1YX-1x(θ)dθ).(21)
由初始条件xT(0)x(0)≤c1可得
V(x(t))<c1eαt[λmax(X-1)+τλmax(X-1YX-1)]≤
c1eαt[λmax(X-1)+τ0λmax(X-1YX-1)],(22)
又由于
V(x(t))>xT(t)X-1x(t)≥
λmin(X-1)xT(t)x(t),(23)
由式(22)和(23)可得
xT(t)x(t)<(c1)/(λmin(X-1))[λmax(X-1)+
τ0λmax(X-1YX-1)]eαt,t∈[0,T],(24)
因此有
xT(t)x(t)<(c1)/(λmin(X-1))[λmax(X-1)+
τ0λmax(X-1YX-1)] eαT.(25)
结合式(13)可得xT(t)x(t)<c2,系统(1)关于(c1,c2,T)是FTS的.
由于系统(1)既满足渐近稳定又满足FTS,所以系统是混合稳定的.令
dt=(c1)/(λmin(X-1))[λmax(X-1)+
τ0λmax(X-1YX-1)] eαt,
由xT(0)x(0)≤c1可得
xT(t)x(t)≤(c1)/(λmin(X-1))[λmax(X-1)+
τ0λmax(X-1YX-1)] eαt.
对满足初始条件xT(0)x(0)≤c1的状态x定义其可允许达到的集合(可许集)如下:
εt:={z∈Rn|zTX-1z≤dt},t∈[0,T].(26)
设t1≤t2,则dtub>1≤dt2,就有εt1εt2,可得到如下关系式:
∪t∈[0,T]εt=εT.
下面证明在给定的有限时间内,系统控制输入总是满足输入受限约束条件(4).
因为u=ZX-1x(t),所以
maxt∈[0,T]|ui(t)|2=maxt∈[0,T]|(ZX-1x(t))i|2,(27)
由状态的可许集(26)可知
maxt∈[0,T]|(ZX-1x(t))i|2≤
maxz∈∪t∈[0,T]εt|(ZX-1z)i|2,
因为∪t∈[0,T]εt=εT,所以
maxz∈∪t∈[0,T]εt|(ZX-1z)i|2=maxz∈εub>T|(ZX-1z)i|2.(28)
因为zTX-1z≤dT,所以d-1TzTX-1z≤1,即
=(dTX)-1/2z=2≤1,
所以
maxz∈εub>T|(ZX-1z)i|2≤
max=(dTZ)-1/2z=2=1|(ZX-1z)i|2.
因为ZX-1z=d<sup>1/2ub>TZX1/2[(dTX)-1/2z],所以
max=(dTX)-1/2z=ub>2=1|(ZX-1z)i|2=
max=(dub>TX)-1/2z=2=1|(d<sup>1/2ub>TZX-1/2[(dTX)-1/2z])i|2=
=d<sup>1/2ub>TZX-1/2=22=dTZiX-1ZTi.(29)
对式(14)应用Schur补引理可知
c2ZiX-1ZTi≤(uimax)2,t∈[0,T].
由
dT=(c1)/(λmin(X-1))[λmax(X-1)+
τλmax(X-1YX-1)] eαT <c2,
可得
maxt∈[0,T]|ui(t)|2≤dTZiX-1ZTi <
c2ZiX-1ZTi≤(uimax)2,
因此
maxt∈[0,T]|ui(t)|2<(uimax)2.
所以系统(1)是满足输入受限条件,证毕.
定理1中的条件(13)不是LMI约束,这使得我们无法直接调用MATLAB中的LMI工具箱.因此需要将条件(13)改进成LMI约束的形式,即有如下推论.
推论1 如果存在标量τ0>0,α≥0,λ>0,δ>0,ε>0,β1>0,β2>0,β3>0和正定对称矩阵X∈Rn,Y∈Rn和矩阵Z∈Rm×n,使得以下不等式成立:
[Ξ A1X XET0 0 ZTETB
XAT1 -Y 0 XET1 0
E0X 0 -λI 0 0
0 E1X 0 -δI 0
EBZ 0 0 0 -εI]<0,(30)
[X I
I β1I]≤0,[X I
I β2I]≥0,(31)
[Y-1 X-1
X-1 β3I]<0,(32)
[-c2e-αTβ1(c1)1/2β2(c1τ0)1/2β3
(c1)1/2β2 -β2 0
(c1τ0)1/2β3 0 -β3]<0,(33)
[u2imax/c2 Zi
ZTi X]≥0,i=1,2,…,m,(34)
则对任意满足0≤τ≤τ0的滞后时间τ,存在形如式(11)的控制器,使得系统(1)和该控制器构成的闭环系统混合稳定且u(t)满足输入受限条件.其中状态反馈增益矩阵K=ZX-1.
证明 由矩阵的Schur补引理可知,矩阵不等式(31)和(32)分别等价于
β1I<X-1,β2I>X-1,β3I>X-1YX-1,
可得
β1<λmin(X-1),β2>λmax(X-1),
β3>λmax(X-1YX-1).(35)
由式(33)应用Schur补引理可得
-c2e-αTβ1+c1β2+τ0c1β3<0.(36)
将式(36)代入上式可得
-c2e-αTλmin(X-1)+c1λmax(X-1)+
τ0c1λmax(X-1YX-1)<0.
式(36)即为定理1中的式(13).根据定理1得证本推论.
由于推论1的式(32)中X-1和Y-1的存在,还是无法直接调用LMI工具箱,可以利用文献[18]中的锥补线性化算法将其转化成非线性最小化问题,得到次优解.虽然不能得到最优解且会具有一定的保守性,但是转化后的非线性最小化问题比原来的非凸可行性问题更容易求解.为了解决这个问题,定义变量矩阵U∈Rn,V∈Rn,由引理2可知如果满足
[X I
I U]≥0,[Y I
I V]≥0,(37)
且
min{trace(XU+YV)}=2n,
则UX=I,VY=I成立,那么推论1中的条件(32)等价于
[V U
U β3I]<0.(38)
推论1可转化为如下优化问题:
min{trace(XU+YV)},(39)
满足LMIs:(30),(31),(33),(34),(37),(38).
下面是求解式(39)优化问题的锥补线性化迭代算法[21]步骤:
1)给定一个足够小的计算精度υ>0和允许的最大迭代步数N;
2)求出一个可行解集(X0,Y0,Z0,U0,V0,λ0,δ0,ε0,β01,β02,β03,u0)满足式(30),(31),(33),(34),(37),(38).如果满足条件
|trace(X0U0+Y0V0)-2n|<υ,
那么系统的控制器为K=Z0(X0)-1,否则,令k=0,进行下一步;
3)求解以下LMI问题:
min{trace(XkU+UkX+YkV+VkY)},
满足LMIs:(30),(31),(33),(34),(37),(38).
令Xk+1=X,Yk+1=Y,Zk+1=Z,Uk+1=U,Vk+1=V;
4)如果满足条件
min{trace(Xk+1Uk+1+Yk+1Vk+1)-2n}<υ,
那么系统的控制器为K=Zk+1(Xk+1)-1,否则令k=k+1,进行步骤3).如果k>N,退出计算,说明优化问题(39)无解.
3 数值仿真
以某无人机为例验证本文中所提控制方法的有效性,无人机纵向动力学模型[22]如下:
mqV·=Fxtcos α-Fytsin α,
mqV(·overα)=mqVq-Fxtsin α-Fytcos α,
(·over)=q,
(·overq)=(MZ)/(IZ),
(·overH)=Vcos αsin -Vsin αcos ,(40)
其中,V,α,,q,H分别表示速度、迎角、俯仰角、俯仰角速率和高度,mq为飞行器的质量,IZ为俯仰转动惯量,Fxt和Fyt为机体所受到的合力在机体轴系xt和yt的分量,MZ为合力产生的俯仰力矩,控制输入为升降舵偏转角δz(rad)和油门中值δp,具体表达式及物理参数参考文献[22].控制输入δz和δp分别满足
-0.52≤δz≤0.52,
0≤δp≤1.
本节仿真的目的是考虑在时滞、输入受限和不确定性影响下,设计混合稳定控制器使得过渡时间为30 s,速率和高度的超调量不超过10%.速率、迎角、俯仰角、俯仰角和高度稳定在平衡点,平衡点处状态
xtrim=[23 0.0363 0.0363 0 20]T.
将无人机模型在平衡点xtrim处线性化可得误差系统
(·overx)(t)=(A0+ΔA0(t))x(t)+(A1+
ΔA1(t))x(t-τ)+(B+ΔB(t))u(t),
其中,τ是由洗流时差引起的时滞,x=[ΔV Δα Δ Δq ΔH]为状态变量增量,u=[Δδz Δδp]T为控制增量,ΔA0(t)、ΔA1(t)和ΔB(t)表示由于线性化和参数摄动引起的误差.为了实现控制目的,选取(c1,c2,T)=(2.1,6,30),给定α=0.1.由推论1可得混合稳定控制器K,时滞τ=0.1,A0、A1、B、ΔA0、ΔA1、ΔB和K的具体数值见附录.
将得到的控制器在无人机非线性模型(40)上进行仿真,图1是系统控制输入的变化曲线,图2~6是系统各个状态的响应曲线,为了更好地说明混合稳定的优越性,对模型(40)分别采用混合稳定控制器和渐近稳定控制器,得到图7~9在两个不同控制器作用下的速度响应曲线、高度响应曲线和xTx响应曲线.
由仿真结果图可以看出,无人机在时滞、不确定性和输入受限情况下,速率、迎角、俯仰角、俯仰角和高度稳定在平衡点,速率和高度的超调量很小且整个过程都满足输入受限约束条件.通过对比渐近稳定控制器和混合稳定控制器的仿真图,可得使用渐近稳定控制器时高度变化曲线过渡时间长且超调量大.这表明了本研究设计的混合稳定控制器方法的有效性和优越性,有利于保证无人机的暂态性能和稳态性能.
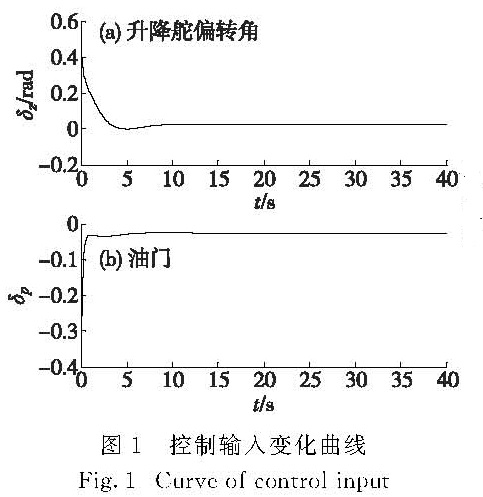
图1 控制输入变化曲线
Fig.1 Curve of control input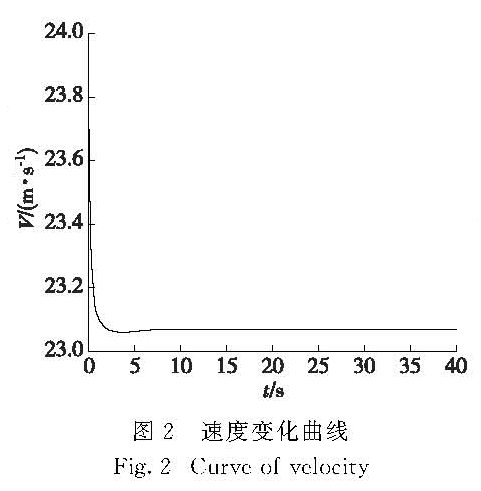
图2 速度变化曲线
Fig.2 Curve of velocity
图3 迎角变化曲线
Fig.3 Curve of attack angle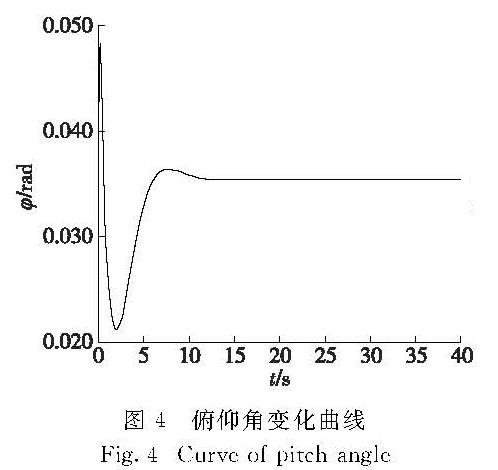
图4 俯仰角变化曲线
Fig.4 Curve of pitch angle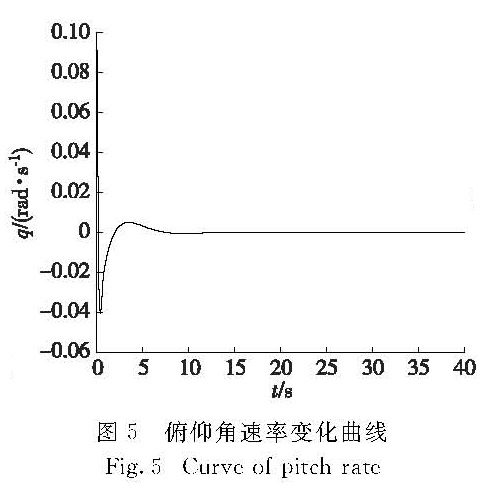
图5 俯仰角速率变化曲线
Fig.5 Curve of pitch rate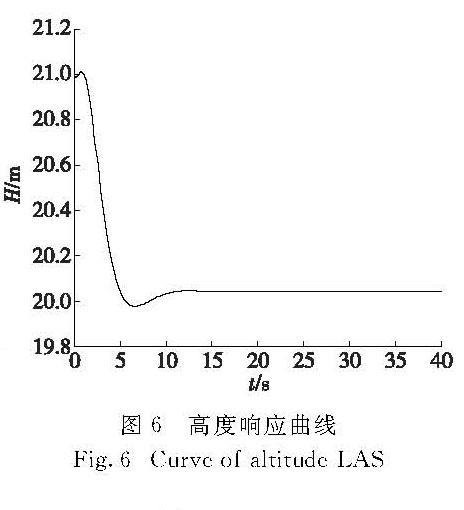
图6 高度响应曲线
Fig.6 Curve of altitude LAS
图7 分别用混合稳定控制器和控制器的速度响应曲线
Fig.7 Curves of velocity under mixed controller and LAS controller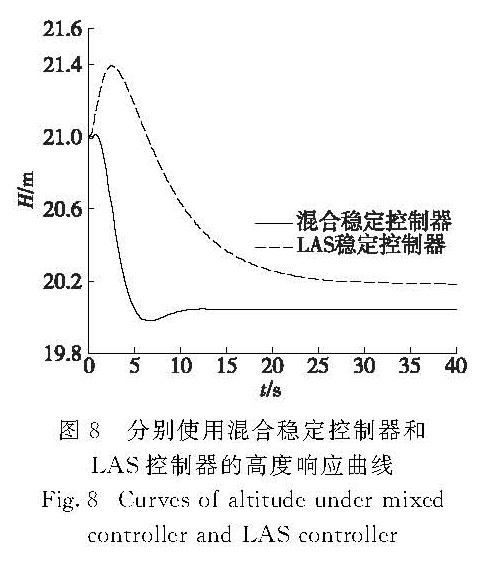
图8 分别使用混合稳定控制器和LAS控制器的高度响应曲线
Fig.8 Curves of altitude under mixed controller and AS controller
图9 分别使用混合稳定控制器和LAS控制器xTx曲线
Fig.9 Curves of xTx under mixed controller and LAS controller4 结 论
在考虑输入受限的情况下,研究了不确定线性时滞系统的混合稳定性.混合稳定性既考虑无穷时间区间上的渐近稳定性,也考虑了有限时间段内暂态性能.本文中给出了闭环系统在满足给定输入约束条件下混合稳定的充分条件,通过锥补线性化算法求解控制器.通过无人机模型上的仿真,表明该控制方案达到了预期暂态性能和稳态性能的控制效果.
- [1] DORATO P.Short-time stability in linear time-varying systems[C]∥Proc of the IRE International Convention Record,Part 4.New York,USA:IEEE,1961:83-87.
- [2] AMATO F,ARIOLA M,DORATO P.Finite-time control of linear systems subject to parametric uncertainties and disturbances[J].Automatica,2001,37(9):1459-1463.
- [3] MICHEL A N,WU S H.Stability of discrete systems over a finite interval of time[J].International Journal of Control,1969,9(6):679-693.
- [4] GARRARD W L.Further results on the synthesis of finite-time stable systems[J].IEEE Transactions on Automatic Control,1972,17(1):142-144.
- [5] SAN FILIPPO F A,DORATO P.Short-time parameter optimization with flight control application[J].Automatica,1974,10(4):425-430.
- [6] DORATO P,ABDALLAH C T,FAMULARO D.Robust finite-time stability design via linear matrix inequalities[C]∥Proc of the 36th IEEE Conference on Decision and Control.San Diego,USA:IEEE,1997:1305-1306.
- [7] 林灿煌,孙洪飞.输入受限不确定线性系统混合镇定[J].厦门大学学报(自然科学版),2016 55(2):244-250.
- [8] FRIDMAN E,SHAKED U.An improved stabilization method for linear time-delay systems[J].IEEE Transactions on Automatic Control,2002,47(11):1931-1937.
- [9] HE Y,WU M,SHE J H,et al.Parameter-dependent Lyapunov functional for stability of time-delay systems with polytopic-type uncertainties[J].IEEE Transactions on Automatic Control,2004,49(5):828-832.
- [10] XU S,LAM J.Improved delay-dependent stability criteria for time-delay[J].IEEE Transactions on Automatic Control,2005,50(3):384-387.
- [11] HE D F,JI H B.Constructive model predictive control for constrained nonlinear systems[J].Optimal Control Applications and Methods,2008,29(6):467-481.
- [12] WEN C,ZHOU J,LIU Z,et al.Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance[J].IEEE Transactions on Automatic Control,2011,56(7):1672-1678.
- [13] HU T,TEEL A R,LIN Z.Lyapunov characterization of forced oscillations[J].Automatica,2005,41(10):1723-1735.
- [14] MESQUINE F.Robust regulator problem for linear uncertain systems with state and control constraints[C]∥Proc of the 18th IEEE Conference on Control and Automation.Marrakech,Mediterranean:IEEE,2010:652-657.
- [15] GRIMM G,TEEL A R,ZACCARIAN L.Linear LMI-based external anti-windup augmentation for stable linear systems[J].Automatica,2004,40(11):1987-1996.
- [16] HERRMANN G,MENON P P,TURNER M C,et al.Anti-windup synthesis for nonlinear dynamic inversion control schemes[J].International Journal of Robust and Nonlinear Control,2010,20(13):1465-1482.
- [17] TARBOURIECH S,SILVA JR J M G.Synthesis of controllers for continuous-time delay systems with saturating controls via LMIs[J].IEEE Transactions on Automatic Control,2000,45(1):105-111.
- [18] 俞立.鲁棒控制:线性矩阵不等式处理方法[M].北京:淸华大学出版社,2002:69-95.
- [19] STOJANOVIC S B,DEBELJKOVIC D L,ANTIC D S.Robust finite-time stability and stabilization of linear uncertain time-delay systems[J].Asian Journal of Control,2013,15(5):1548-1554.
- [20] XIE L.Output feedback H∞ control of systems with parameter uncertainty[J].International Journal of control,1996,63(4):741-750.
- [21] SONG X,ZHOU S,ZHANG B.A cone complementarity linearization approach to robust H∞ controller design for continuous-time piecewise linear systems with linear fractional uncertainties[J].Nonlinear Analysis:Hybrid Systems,2008,2(4):1264-1274.
- [22] 蔡系海,付荣,曾建平.倾转旋翼机模态转换的鲁棒H∞增益调度控制[J].厦门大学学报(自然科学版),2015 55(3):382-389.
